Listing 3
# /etc/udev/rules.d/95-ads7843.rules
SUBSYSTEM=="input", ATTRS{name}=="ADS7843 Touchscreen", ENV{DEVNAME}=="*even*", SYMLINK+="input/touchscreen"
Den genauen Namen für das Device entnehmen Sie in der Regel der Ausgabe von sudo dmesg. Hier erscheint beim Autor eine Zeile des Inhalts input: ADS7843 Touchscreen as /devices/.... Nach einem Neustart sollte "/dev/input/touchscreen" als symbolischer Link auf das eigentliche Eingabe-Device existieren.
Als letzte Modifikation des Systems steht der automatische Start der Kamerasoftware nach dem Hochfahren an. Dazu fügen Sie in die Datei /etc/rc.local vor dem abschließenden exit die Zeilen aus Listing 4 ein.
Listing 4
$ python /usr/local/picam/cam.py $ shutdown -h now
Beenden Sie später die Kamerasoftware über den entsprechenden Menüpunkt, fährt anschließend das System auch wieder herunter. Für Testzwecke kommentieren Sie die zweite Zeile aus Listing 3 aus; für einen Neustart der Kamerasoftware müssen Sie sich aber per SSH anmelden und den ersten Befehl per Sudo ausführen.
Bedienung
Auf dem Touchscreen zeigt die Kamera ein Vorschaubild sowie zwei überlagerte Buttons (Abbildung 7). Der linke davon führt in das Einstellungsmenü, über das Sie auch die Kamera wieder herunterfahren. Der rechte ermöglicht, alle aufgenommenen Bilder anzuzeigen. Auch der Rest des Bildschirms dient quasi als aktiver Button und fungiert als Auslöser. Letztlich heißt es also: Objekt auswählen und Bildschirm berühren. Halten Sie die Kamera dabei möglichst ruhig, denn es gibt eine kurze Auslöseverzögerung; bei der Originalsoftware von Adafruit betrug diese beim ersten Bild sogar mehrere Sekunden.
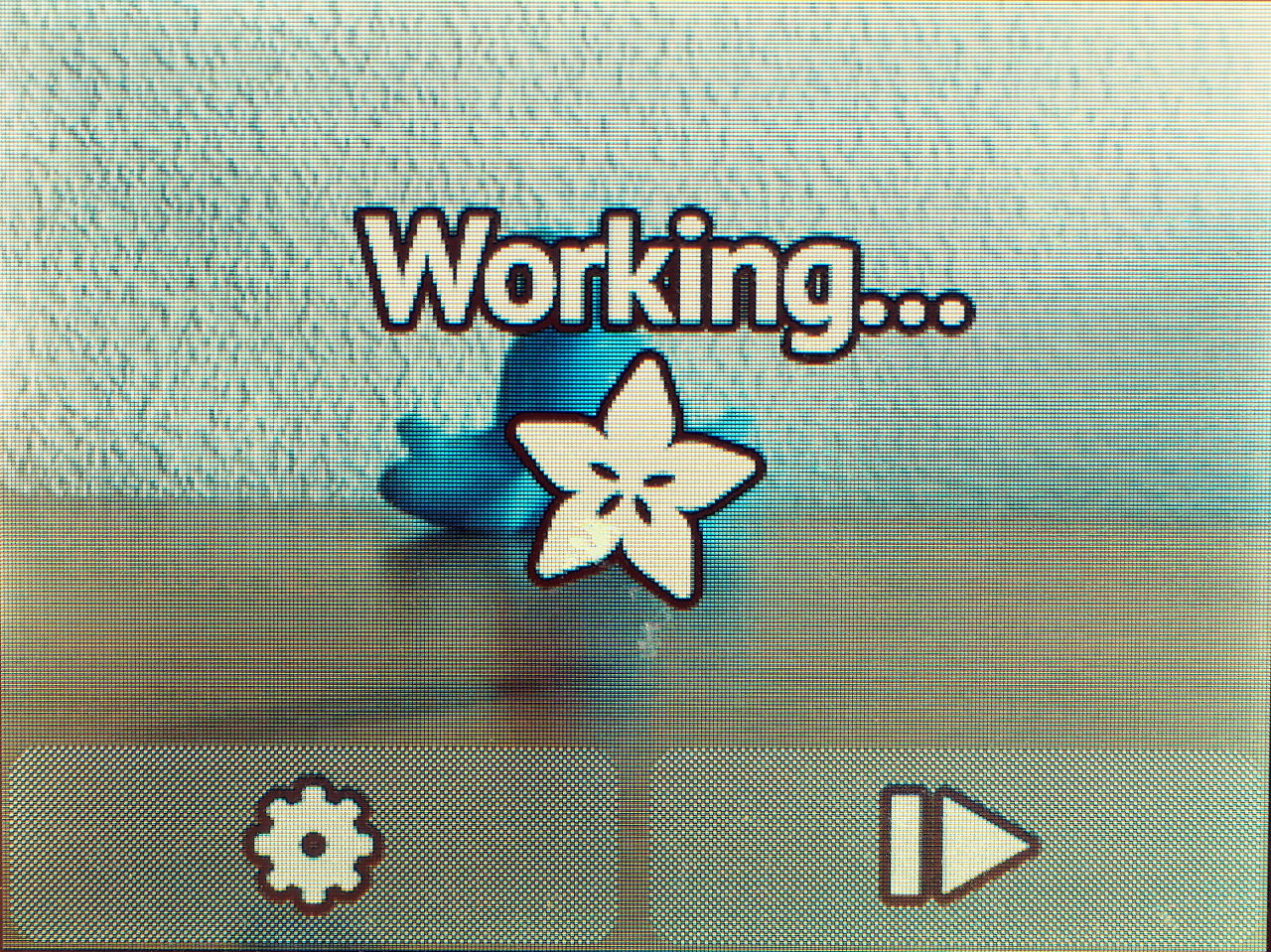
Abbildung 7: Aufnahmen erstellen Sie mit einem Fingertipp auf das Display. Das Symbol unten rechts öffnet die Galerie, das links die Einstellungen.
Beim Vorschaubild handelt es sich technisch gesehen um laufend aufgenommene und aktualisierte Fotos. Die aktuelle Generation der Bildschirme rendert in der CPU, das Python-Kameraprogramm nimmt also in einer schnellen Endlosschleife ständig Bilder auf und aktualisiert dann den Bildschirm. Das funktioniert aber so gut, dass kaum störende Ruckler entstehen.
Ein Stöbern im Einstellungsmenü lohnt sich: Neben der Größe der Bilder stellen Sie dort Dinge ein wie den Speicherort, Effekte und den Weißabgleich – Letzteres aber nur in der angepassten Version. Es gibt einen speziellen Speicherort Dropbox, der die Bilder gleich nach der Aufnahme in die Cloud schickt. Dafür müssen Sie aber noch ein Upload-Skript konfigurieren, wie es die Adafruit-Dokumentation [8] beschreibt.
Trotz der Verbesserungen des Autors handelt es sich bei der Steuersoftware um eine noch sehr rudimentäre Umsetzung, die den Funktionsumfang der Kamera bei Weitem nicht ausreizt. Dank Python und dem durch Adafruit vorgegebenen Programmgerüst lassen sich aber Erweiterungen mit wenig Aufwand implementieren. Interessant für die IR-Fotografie wäre auf alle Fälle auch die Speicherung der rohen Sensordaten.
Nachbearbeitung
Der automatische Upload in die Cloud mit Dropbox erscheint mehr als Spielerei – gilt es doch, nach jeder Aufnahme zu warten, bis die Software ungefähr 5 MByte über ein angeschlossenes Smartphone hochlädt. Da erscheint es sinnvoller, wie bei normalen Kameras die Fotos am Ende des Ausflugs auf den heimischen Rechner für das Weiterbearbeiten herunterzuladen. Mit dem integrierten WLAN-Dongle entfällt sogar das Jonglieren mit der Speicherkarte. Am einfachsten laden Sie die Bilder auf einem Linux-Rechner mit dem folgenden Befehl:
$ rsync -av --remove-source-files pi@picam:/home/pi/Photos/ .
Den Rechnernamen picam ersetzen Sie durch die IP-Adresse beziehungsweise den Hostnamen der Kamera. Der Befehl löscht nach erfolgreicher Übertragung gleich die Bilder von der Kamera.
Die Infrarotbilder der Pi-Kamera erscheinen fast schwarz-weiß und etwas verwaschen. Das liegt auch daran, dass das NoIR-Kameramodul nicht für den IR-Betrieb optimiert ist [9]. Es fehlt zwar der Sperrfilter, die Fokusdistanz wurde aber nicht angepasst. Perfektionisten können die Linse minimal herausdrehen.
Wie eingangs schon beschrieben, enthalten IR-Bilder auch Farbinformationen – zumindest bei IR-Filtern mit einer Sperrfrequenz unter 750 nm. Bei der Pi-Kamera unterscheiden sich die Farbkanäle aber nur minimal. Trotzdem erlaubt die Aufnahme das kreative Spielen. Dazu laden Sie das Foto in Gimp, wählen unter Farben den Punkt Werte und passen den Bereich über die kleinen Dreiecke für jeden Kanal getrennt an. Wählen Sie dafür aus dem Dropdown-Menü Kanal: nacheinander die jeweilige Farbe aus (Abbildung 8).
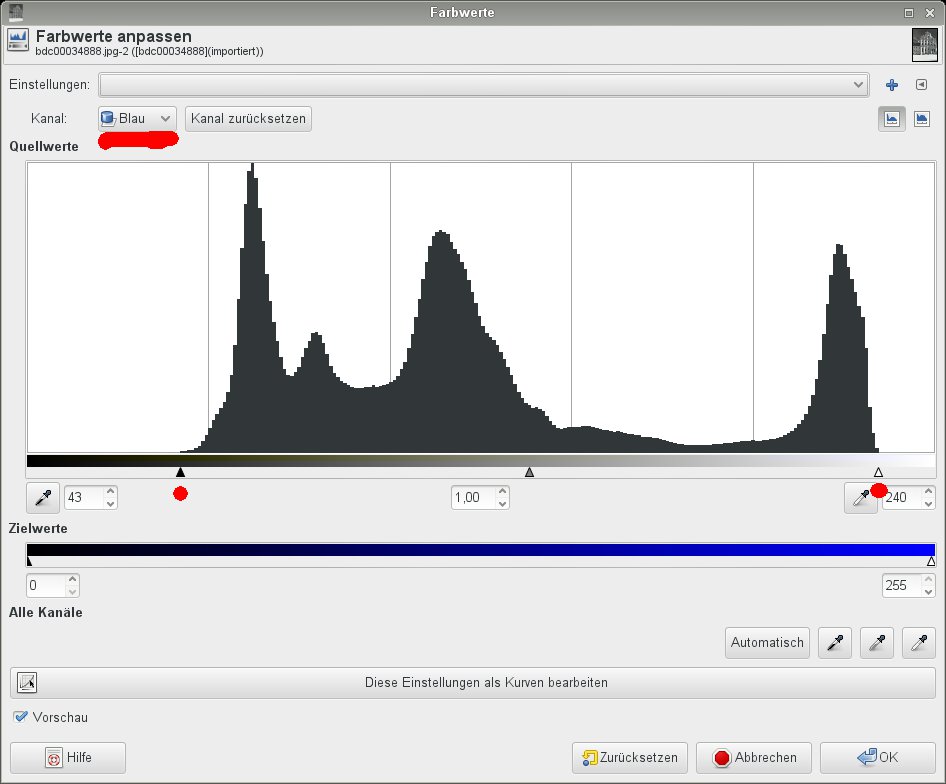
Abbildung 8: In Gimp optimieren Sie kanalweise die Farbwerte der Aufnahme.
Nach dieser ersten Korrektur erfolgt anschließend der Tausch des roten mit dem blauen Kanal über den Kanalmixer (Abbildung 9). Dabei tauscht das Programm die Inhalte der beiden Kanäle vollständig aus. Um sich den Vorgang zu erleichtern, kopieren Sie vorab den Inhalt von Listing 5 in eine Datei, etwa swap-red-blue, im Verzeichnis ~/.gimp-2.8/channel-mixer. Diese können Sie dann im Kanalmixerdialog einfach laden. Der Kanaltausch führt zu einem blauen Himmel, aber auch zu rötlicher Vegetation. Über das Menü Farben | Farbton/Sättigung… verstärken beziehungsweise schwächen Sie einzelne Farben ab.





