
Schießen, scannen, filmen, malen und noch viel mehr ermöglicht der Fischertechnik-Baukasten Robotics Hightech.
Der erste Teil dieser Reihe [1] beschäftigte sich mit dem Fischertechnik-Baukasten Robotics Hightech. Im Vordergrund stand dabei das Erstellen von Programmen mit ROBO Pro Coding. Die fertigen Programme führte der TXT-4.0-Controller aus und erweckte so unser erstes Funktionsmodell zum Leben. Sie finden den Artikel in der Download-Sektion zu diesem Beitrag.
Diesmal sehen wir uns die restlichen acht Modelle des Baukastens im Detail an. Deren Bauanleitungen finden Sie im Baukasten selbst, die Übersicht zu den Aufgaben fasst die Produktseite [2] zusammen. Alle Beispielprogramme zu den Modellen lassen sich über die ROBO-Coding-App aufrufen, indem Sie beim Erstellen des Projekts Beispiel als Vorlage auswählen. Achten Sie dabei auf die Beispielnamen, weil es für einige Modelle mehrere Beispiele gibt, die sich hinsichtlich der Bilder nicht unterscheiden.
Omniwheels x2
Die Bauzeit für das Omniwheels-x2-Modell beträgt etwa 75 Minuten. Für den ersten Test sollten Sie das Modell auf einem kleinen Gestell platzieren, damit es nicht versehentlich wegfährt. Falls die Verdrahtung nicht zu den Beispielprogrammen passt, basteln Sie besser nicht im Programm herum, sondern schließen lieber die Leitungen richtig an.
Steuert das Programm die Motoren in die Linksrichtung an, fährt der Roboter vorwärts. Falls nicht, vertauschen Sie die Leitungen am Motor. Um den IR-Sensor zu testen, brauchen Sie eine weiße Fläche mit schwarzen Markierungen. Es genügt nicht, lediglich den Finger vor den Sensor zu halten – das klappt nicht gut.
Nach Abschluss der Tests und der Vorbereitungen geht es ans Programmieren. Hier gilt es, die Funktionsweise der Encoder-Motoren zu verstehen. Eine sehr detaillierte Beschreibung finden Sie in den Aufgaben zu diesem Modell [3].
Nach den ersten einfachen Fahrversuchen geht es daran, den Linienfolger (Abbildung 1) über das Testgelände (Papier-Parcours aus dem Baukasten) zu schicken. Achten Sie darauf, dass das Papier möglichst glatt liegt, sonst bleibt der Roboter eventuell mit dem Sensor an den Falten und Dellen hängen.
Der Abstand zwischen Sensor und Boden fällt generell sehr knapp aus. Falls der Roboter nicht zu 100 Prozent optimal arbeitet, passen Sie die Variablen speed_fast und speed_low an. Ein Video, das den Roboter in Aktion zeigt, finden Sie auf Youtube [4].
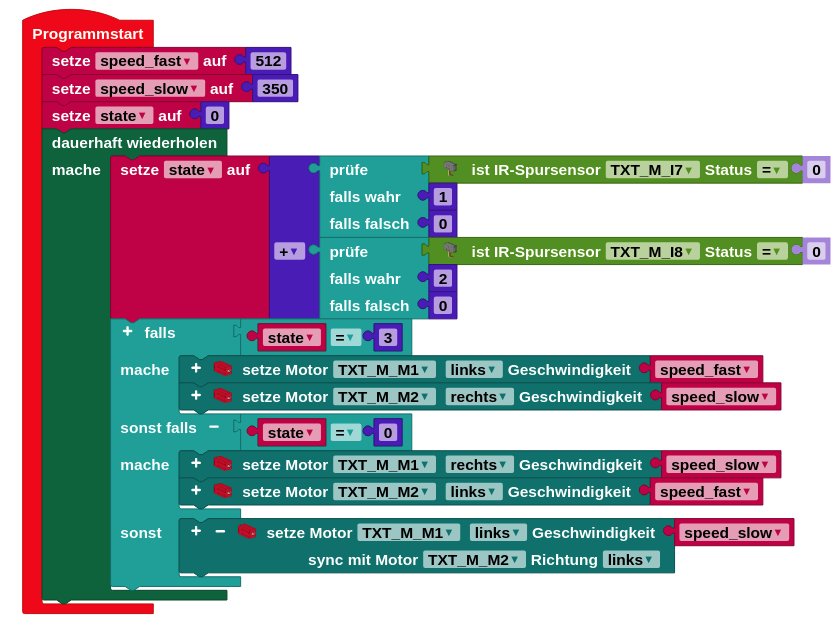
Abbildung 1: Das Programm, das den Linienfolger steuert.
Omniwheels x4
Obwohl das Modell Omniwheels x4 größer ausfällt als die x2-Variante, lässt es sich in knapp einer Stunde aufbauen. Das liegt zum einen daran, dass sich der Motorenblock aus dem ersten Modell wiederverwenden lässt, und zum anderen daran, dass etwas mehr Platz für die Verdrahtung zur Verfügung steht.
Der Autor beschriftete alle Motoren, was bei der Fehlersuche und Inbetriebnahme ungemein half. Um zu sehen, ob sich alle Motoren wie erwartet drehen, sollten Sie auch dieses Modell zunächst auf einen Halter stellen.
Das Modell dient dazu, die Möglichkeiten der Omniwheels zu erkunden. Es kommen dabei keine Sensoren zum Einsatz. Die Aufgaben zu diesem Modell finden Sie im entsprechenden Bereich der Fischertechnik-Webseite [5], ein Youtube-Video [6] zeigt das Gefährt im Betrieb.
Kameramann
Um den Kameramann (Abbildung 2) zu bauen, müssen Sie den Roboter nicht auseinandernehmen. Lassen Sie ihn sinnvollerweise komplett, weil er als Basis für alle folgenden Modelle dient. Die Qualität der Farberkennung hängt vom vorhandenen Licht ab.





