Falls das Beispielprogramm kein optimales Ergebnis liefert, versuchen Sie am besten, mit einer zusätzlichen Lichtquelle zu arbeiten. Beispielsweise lassen sich die im Baukasten vorhandenen LEDs an dieser Stelle verwenden. Falls die Farberkennung nicht die richtige Farbe ausgibt, nehmen Sie die Toleranz für die einzelnen Farben etwas zurück.

Abbildung 2: Der Kameramann erkennt verschiedene Farben, Formen und Bewegungen.
Mit dem Kameramann lernen Sie die Grundlagen der Bildverarbeitung und das Erstellen von Anzeigen auf dem Display des TXT-4.0-Controllers kennen. Der kleine Bildschirm zeigt nicht nur die Ergebnisse von Programmen an, sondern erlaubt auch die Abfrage von Bedienelementen wie Buttons oder Checkboxen. Es gibt diverse Elemente, um auf dem kleinen Display eine Benutzeroberfläche zu bauen (Abbildung 3).
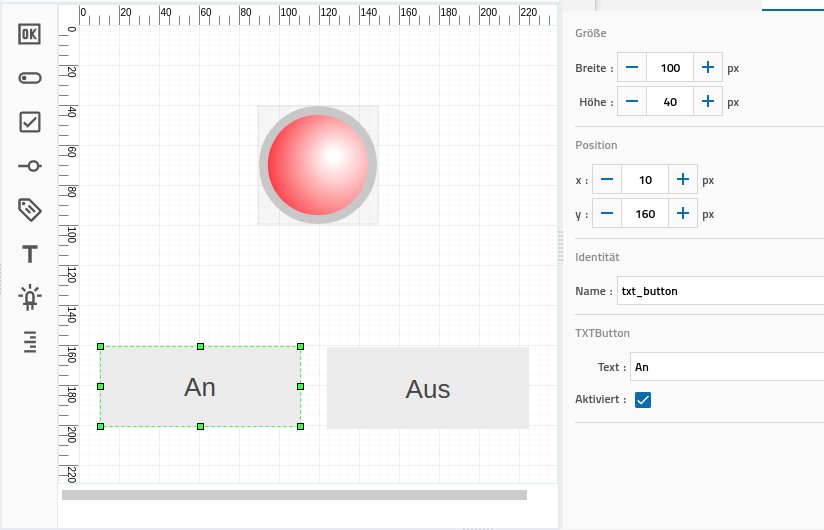
Abbildung 3: Das integrierte Tool zum Erstellen von Oberflächen auf dem Display des TXT-4.0-Controllers.
Die Kamera richten Sie bei Bedarf mit einem eigenen Werkzeug ein (Abbildung 4). Es erlaubt das Definieren unterschiedlicher Bildausschnitte und regelt, wie das Programm die Informationen im jeweiligen Bereich interpretiert. Als Mechanismen stehen Farberkennung, Bewegungserkennung, Linienerkennung und das Erkennen von Bällen zur Auswahl.
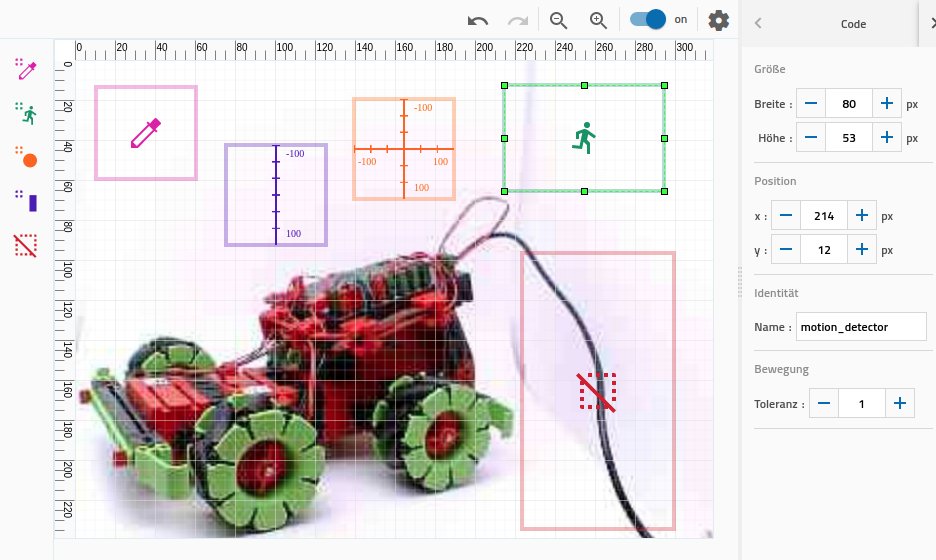
Abbildung 4: Das Tool zum Einrichten der Kamera erlaubt die unterschiedliche Interpretation von Motiven.
Zusätzlich lassen sich gezielt Bildbereiche von der Verarbeitung ausschließen. Die Aufgabe aus dem entsprechenden Bereich der Fischertechnik-Webseite [7] beschreibt genau, wie die Programme die Informationen von der Kamera auswerten.
Ballroboter
Das Omniwheels-x4-Modell dient als Basis für den Ballroboter (Abbildung 5). Hier gilt es zu beachten, welche Teile genau Sie zurückbauen müssen. Den in der Anleitung vorgeschlagenen Rückbau können Sie überspringen, den Kameramann müssen Sie jedoch zerlegen.
Beim Ballroboter handelt es sich um das komplexeste Modell aus dem Baukasten, aber auch um das interessanteste. Es dauert beinahe zwei Stunden, bis sich der erste Ball schießen lässt. Die Schusseinheit nutzt einige trickreiche Montagetechniken. Der Aufbau des Modells erfordert fast den kompletten Inhalt des Baukastens.

Abbildung 5: Der Ballroboter stellt das anspruchsvollste, aber auch interessanteste Modell aus dem Baukasten dar.
Die Bälle fliegen überraschend weit und neigen dazu, unter Schränke zu rollen. Daher sollten Sie bei den ersten Versuchen genau kalkulieren, wohin Sie schießen. Auch sollten Sie darauf achten, den Servomotor nicht zu überlasten, da er sonst recht schnell kaputtgeht. Eine Überlast entsteht vor allem, wenn Sie den Motor mit einem Signal ansteuern, das den Hebel außerhalb der mechanischen Endlagen bringen würde. Ein dauerhaftes Verklemmen des Motors verursacht dasselbe Problem.
Je nachdem, wie der Hebel auf den Servo passt, kommt es vor, dass Sie die Positionen im Programm etwas nachjustieren müssen, damit der Lade- und Feuermechanismus richtig arbeitet. Die Beispielprogramme sehen dafür immer Variablen vor, über die Sie die Anpassungen vornehmen. Die Aufgaben auf der zugehörigen Webseite [8] beschreiben die Funktionsweise der einzelnen Programme. Die Beispiele erklären auch, wie Sie Bibliotheken mit der ROBO Coding App erzeugen.
Für das Sprachbeispiel benötigen Sie ein Smartphone mit einer zusätzlichen App, die Sie mit dem Controller verbinden. Entsprechend muss sich das Smartphone im lokalen Netz befinden. Bei Youtube [9] finden Sie ein kleines Video, das den Roboter im Einsatz zeigt.
Omniwheels x4 mit Sensoren
Um den Omniwheels x4 mit Sensoren (Abbildung 6) aufzubauen, müssen Sie zunächst das vorherige Modell ein Stück weit zurückbauen. Die Verkleidung bleibt davon unberührt. Sie benötigen für den einfachen Aufbau knapp 45 Minuten. Achten Sie darauf, die in den Aufgaben gezeigte Änderung für den IR-Sensor umzusetzen. Das Modell demonstriert in sechs Aufgaben [10] die Grundlagen des autonomen Fahrens.





