
Abbildung 6: Der Omniwheels-Roboter mit verschiedenen Sensoren. Er veranschaulicht die Grundlagen des autonomen Fahrens.
Bei den Beispielprogrammen mit Farberkennung kommt es vor, dass Sie die Kameraeinstellungen an die Lichtverhältnisse anpassen müssen. Wählen Sie dazu den entsprechenden Layer aus und passen Sie im Reiter Inspector die Hue-Toleranz und gegebenenfalls die Farbe etwas an. Im Youtube-Video [11] sehen Sie den Linienfolger mit Hinderniserkennung im Einsatz.
Malroboter
Das Bauen des Malroboters (Abbildung 7) erfordert einige größere Umbauten des vorhandenen Modells, die etwa eine Stunde dauern. Zu diesem Modell gibt es nur eine einzige Aufgabe [12]. Prüfen Sie als Erstes die Werte der Servopositionen und richten Sie danach den Stift aus. Das Beispielprogramm verfügt über zwei Buttons, mit denen Sie den Servo bewegen. In den Funktionen penUp und penDown passen Sie die Werte für die Servoposition an. Das genügt als Vorarbeit, um mit dem Zeichnen zu beginnen.
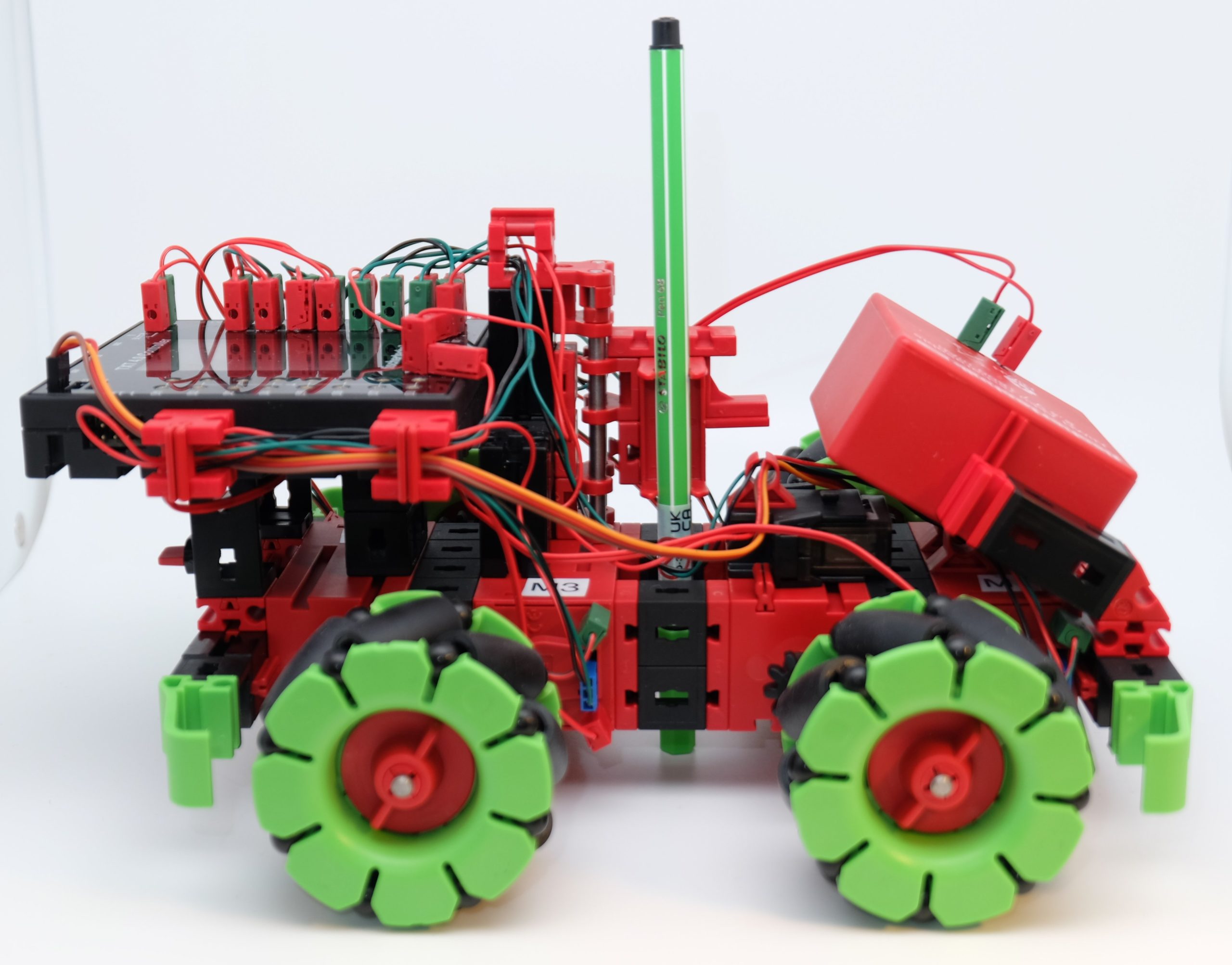
Abbildung 7: Der Malroboter zeichnet einfache geometrische Figuren, auf Wunsch aber auch Tapetenmuster.
Die Figuren, die der Roboter erstellt, passen alle knapp auf ein DIN-A4-Blatt. Es genügt, den Roboter am Anfang genau mittig auf das Blatt zu stellen. Beim Kreis muss man wirklich aufpassen, weil er gerade so passt. Falls Sie ein größeres Papier haben, schadet das nicht.
Damit sich das Papier beim Zeichnen nicht verschiebt, sollten Sie es mit Klebeband fixieren. Mit ein paar kleinen Anpassungen am Beispielprogramm erstellt der Roboter auf Wunsch auch Tapetenmuster [13].
Fußballroboter
Ein oberflächlicher Blick in den Bauplan des Fußballroboters (Abbildung 8) lässt vermuten, dass er denselben Basisaufbau nutzt wie die bisherigen Roboter – ein Irrtum. Beim genaueren Hinsehen fällt auf, dass die Radachsen anders montiert sind, damit der Roboter etwas tiefer liegt. Insgesamt dauert der Umbau etwa 90 Minuten.

Abbildung 8: Fussballroboter mit Ball.
Achten Sie beim Aufbauen darauf, dass sich die Leitungen für die Lichtschranke nicht im Kamerabild befinden, denn das führt womöglich zu Störungen bei der Objekterkennung. Falls diese generell Probleme bereitet, finden Sie am Ende der Aufgabe [14] einen Hinweis, wie Sie vorgehen, um die Bilderkennung zu optimieren. Möglicherweise müssen Sie Anpassungen an den Parametern für den Servo vornehmen. Die entsprechenden Werte stehen nicht wie gewohnt in Variablen am Anfang des Programms, sondern in der Funktion shotBall.
Damit weder Roboter noch Ball das Spielfeld verlassen, empfiehlt es sich, dieses einzuzäunen. Aufgrund der nicht optimalen Lichtverhältnisse im Büro des Autors erkannte der Roboter die Bälle nur sehr schlecht. Daher gibt es zu diesem Roboter kein Video.
Barcodeleser
Auf so gut wie allen Produkten des täglichen Lebens finden sich inzwischen Barcodes. Daher ist der Barcodeleser ein wirklich interessantes Modell, dessen Aufbau lediglich 5 Minuten in Anspruch nimmt. Bei diesem Modell sollten Sie auf jeden Fall das Beispielprogramm verwenden: Es macht definitiv keinen Spaß, die Übersetzungstabellen von Hand zusammenzuklicken.
Das Programm erkennt die Barcodes auf den Beispielkarten und gibt den Klartext auf dem Display des Controllers aus. Dabei kommt Code 39 zum Einsatz. Weiterführende Informationen zu diesem Code finden Sie bei Wikipedia [15]. Bei dieser Kodierung gilt es, auf die Ausrichtung zu achten, sonst deutet der Scanner ein C schnell als eine 7. Auch bei diesem Modell entscheidet das Licht über den Erfolg: Bei zu viel Helligkeit erkennt die Kamera die Balken nicht mehr richtig.
Fazit
Die Modelle aus dem Robotics-Hightech-Kit machen einen Riesenspaß, sodass der Autor die Zeit beim Lösen der Aufgaben vollkommen vergaß. Zusätzlich vermittelt der Baukasten rund um die Aufgaben viel interessantes Wissen. Er bietet einen tollen Einstieg in die Robotik. Nach dem Durcharbeiten aller Beispiele besitzen Sie das nötige Rüstzeug, um eigene Roboter zu bauen. Die im Baukasten mitgelieferten Teile ermöglichen schon eine ganze Menge, die Kombination mit anderen Fischertechnik-Teilen erweitert die Einsatzszenarien noch einmal erheblich. (tle)





