Mit einem einfachen Servomotor und der richtigen Software verwandeln Sie eine Low-Budget-Webcam in eine flexible Überwachungslösung.
README
Mit einer IP-Webcam haben Sie ein wachsames Auge auf einen Bereich. Auf Basis eines RasPi basteln Sie mit wenig Aufwand ein bewegliches Kameraauge nach, das weniger kostet, aber deshalb nicht weniger Möglichkeiten bietet.
Seit einigen Jahren finden sich im Handel zunehmend fernsteuerbare IP-Webcams. Die Hersteller verlangen dafür aber häufig einen saftigen Preis. Da liegt es nahe, die Hardware auf Basis kostengünstiger Komponenten selbst zu bauen. Als Hardware kommen ein Raspberry Pi, eine einfache USB-Webcam und ein Servomotor aus dem Modellbau zum Einsatz.
Um diese Teile zu einem funktionsfähigen Ganzen zu verknüpfen, brauchen Sie noch einige einfache elektronische Komponenten sowie eine zusätzliche Spannungsquelle. Der in diesem Beispiel gezeigte Aufbau fällt recht einfach aus und bietet eine gute Basis für weitere Experimente.
Aufbau
Der Aufbau der Hardware gestaltet sich schlicht: Sie montieren die Webcam auf einen handelsüblichen Servomotor. Der sollte einen festen Stand haben, alternativ bringen Sie ihn an einem schweren Gegenstand an. RasPi und Servomotor sollten Sie über getrennte Spannungsquellen versorgen, um zu verhindern, dass durch den Motor verursachte Spannungsschwankungen den Minirechner zum Absturz bringen.
Zusätzlich erhält die Signalleitung eine kleine Transistorstufe, um Spannungsunterschiede zwischen den GPIO-Ports des Raspberrys und der Stromquelle des Servos auszugleichen. Zusätzlich schützt der Transistor die GPIO vor kleinen Missgeschicken, die gerne passieren, wenn Sie an einem Prototypen bauen. Abbildung 1 zeigt den Schaltplan dazu.
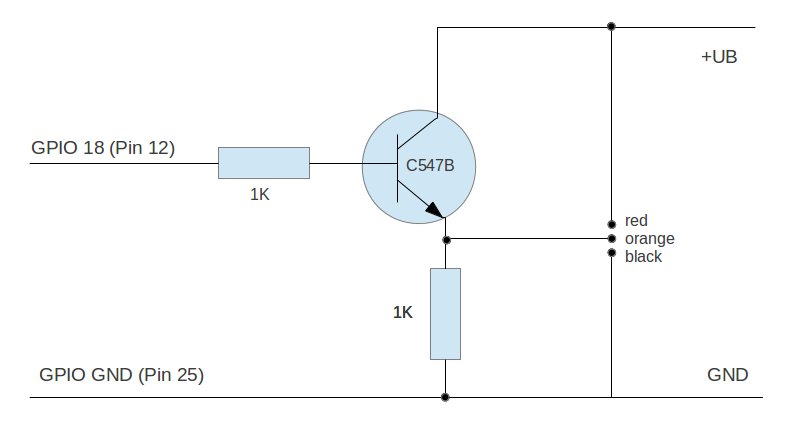
Abbildung 1: Mit einem einfachen Schaltschema fangen Sie Spannungsschwankungen durch den Servomotor ab.
Da der Raspberry Pi nicht in der Lage ist, über den USB-Anschluss unbegrenzt Strom zu liefern, ist es bei einigen Webcams nötig, zusätzlich einen aktiven Hub zu verwenden. Schon eine zusätzliche externe Festplatte verursacht sonst Ärger. Aber jetzt zurück zur Webcam. Abbildung 2 den Aufbau des Prototypen für das vorliegende Beispiel.

Abbildung 2: Für die ersten Tests eignet sich ein etwas großzügigerer Aufbau, da dieser das Verkabeln der Komponenten vereinfacht.
Software einrichten
Als Betriebssystembasis für die Installation kommt ein Raspbian [1] zum Einsatz. Als Erstes erweitern Sie mittels raspi-config das Dateisystem, falls noch nicht geschehen, danach steht ein Reboot an. Alle weiteren Vorbereitungen erledigen Sie dann ohne einen weiteren Neustart. Um das Betriebssystem auf den aktuellen Stand zu heben, nutzen Sie die beiden Befehle aus Listing 1.
Listing 1
$ sudo apt-get update $ sudo apt-get upgrade
Treiber installieren
Glücklicherweise gibt es schon einen Treiber, der den Betrieb von bis zu acht Servos am Raspberry Pi ermöglicht. Allerdings liegt die Software derzeit nur als Quellcode auf GitHub vor. Um diesen herunterzuladen, nutzen Sie den Git-Client, den Sie bei Bedarf mit dem Kommando aus der ersten Zeile von Listing 2 installieren.
Danach laden Sie den Quellcode mit dem Kommando aus Zeile 2 herunter. Wechseln Sie in das entsprechende Verzeichnis (Zeile 3), in dem Sie dann die Software bauen und im Anschluss im Filesystem einrichten (Zeile 4). Nach der Installation finden Sie im Verzeichnis /etc/init.d/ ein Skript mit dem Namen servoblaster. Darüber starten und stoppen Sie den Daemon, der mit dem Servo kommuniziert.
Listing 2
$ sudo apt-get install git-core $ git clone https://github.com/richardghirst/PiBits.git $ cd PiBits/ServoBlaster/user $ sudo make install
Alternativ besteht die Möglichkeit, ein Modul für den Kernel zu verwenden, wobei dieses nur dann fehlerfrei arbeitet, wenn der Kernel zur Version des Moduls passt. Die Installation erledigen Sie mit den beiden Befehlen aus Listing 3.