Speichern Sie die Konfiguration nun mit File | Save as Start-Config. Das bedeutet, dass RevPi diese Konfiguration ab dem nächsten Neustart verwendet. Alternativ speichern Sie eine Konfiguration auch mit Save As. Das erweist sich bei der Entwicklung als hilfreich, wenn Sie mit mehreren Konfigurationen arbeiten möchten.
Um die Konfiguration zu aktivieren, müssen Sie den RevPi einmal neu starten. Die Power-LED des DIO-Moduls sollte nach dem Neustart grün leuchten, statt rot zu blinken. Es kommt vor, dass der RevPi nach dem Neustart vom DHCP-Server eine andere IP-Adresse bekommt. Bemerken Sie nach dem Reboot also sonderbare Probleme, prüfen Sie als Erstes, welche IP-Adresse der RevPi aktuell verwendet.
Wie eingangs erwähnt, gibt es sehr viele Möglichkeiten, den RevPi zu programmieren. Für unser Beispielprogramm wählen wir Node-RED, das sich auf dem RevPi einfach aktivieren lässt und die Programme grafisch erstellt. Um Node-RED zu aktivieren, melden Sie sich über den Browser am RevPi an, wechseln in den Reiter SERVICES und aktivieren die beiden Node-RED-Punkte (Abbildung 7). Mit SAVE ALL übernehmen Sie die Änderungen.

Abbildung 7: Eine übersichtliche Oberfläche erlaubt das komfortable Konfigurieren der Module.
Wechseln Sie nun zum Reiter Apps, dann sehen Sie hinter dem Node-RED-Eintrag den Schalter START. Nach einem Klick darauf öffnet sich Node-RED in einem neuen Browser-Tab. Damit lassen sich recht schnell Abläufe zusammenklicken, sogenannte Flows. Der Flow aus Abbildung 8 schaltet alle LEDs nach und nach an oder aus, je nachdem welche Nachricht Sie injizieren. Mehr Informationen über die Funktionsweise von Node-RED lesen Sie im RPG-Artikel “Einer schafft an” aus Ausgabe 01-02/2019 [11].

Abbildung 8: Mit Node-RED konfigurieren Sie die Module mit grafischen Bausteinen per Drag & Drop.
Förderband
Unser Versuchsaufbau besteht aus zwei einzelnen Förderbändern, die ein Bauteil transportieren (Abbildung 9). Liegt das Bauteil auf dem ersten Band, beginnt der Förderprozess. Kommt es an dessen Ende an, stoppen die Motoren. Der Sensor 1 besteht hier aus einer Lichtschranke, die Sensoren 2 und 3 aus kapazitiven Näherungsschaltern.
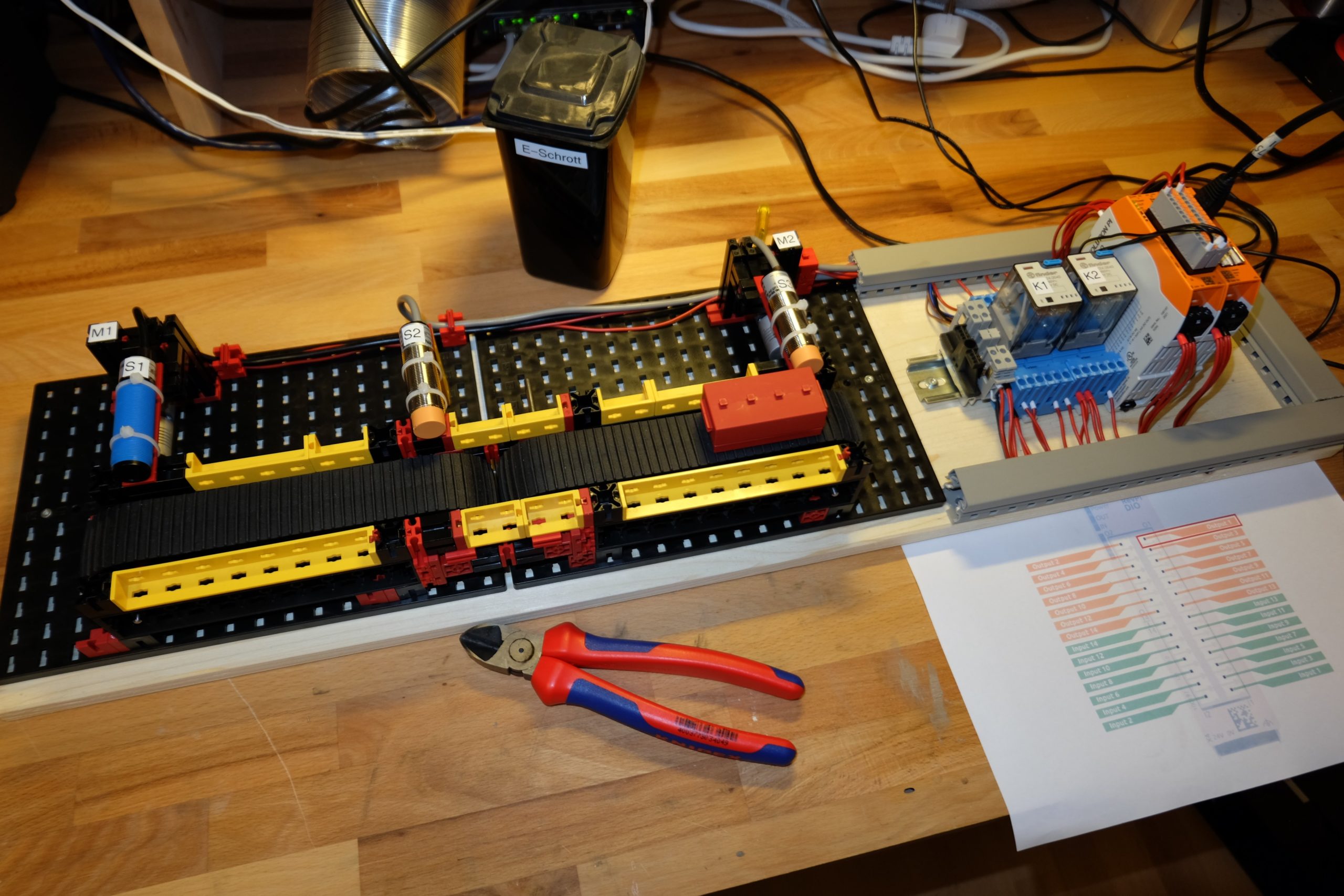
Abbildung 9: Testaufbau der Förderbänder.
Den Node-RED-Flow, der die Anlage steuert, zeigt Abbildung 10. Die Funktionen erzeugen ein True oder False, sobald sie eine Nachricht empfangen. Auf diese Weise (de-)aktivieren die Sensorsignale die Motoren. Falls beim Testen etwas schiefgehen sollte, schaltet die Funktion Inject (false) die Motoren ab.
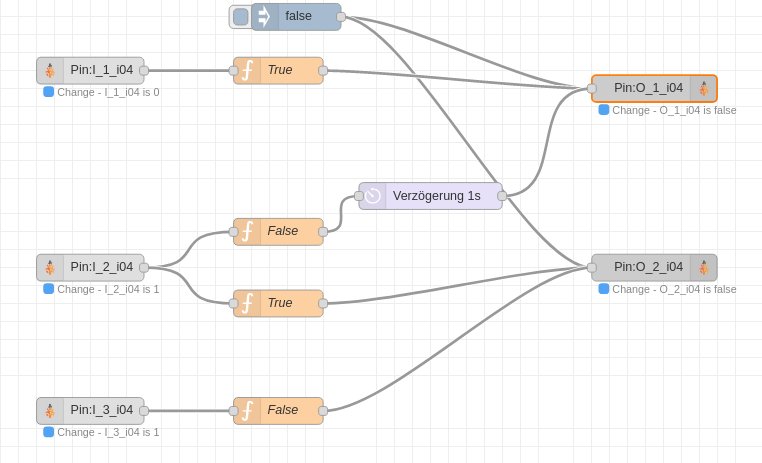
Abbildung 10: Node-RED-Flow zum Steuern der Förderbänder.
Falls die Motoren zu stark nachlaufen, bremsen Sie sie mit einer einfachen Schaltung (Abbildung 11). Sie schließt den Motor kurz, sobald er von der Spannungsversorgung getrennt ist.
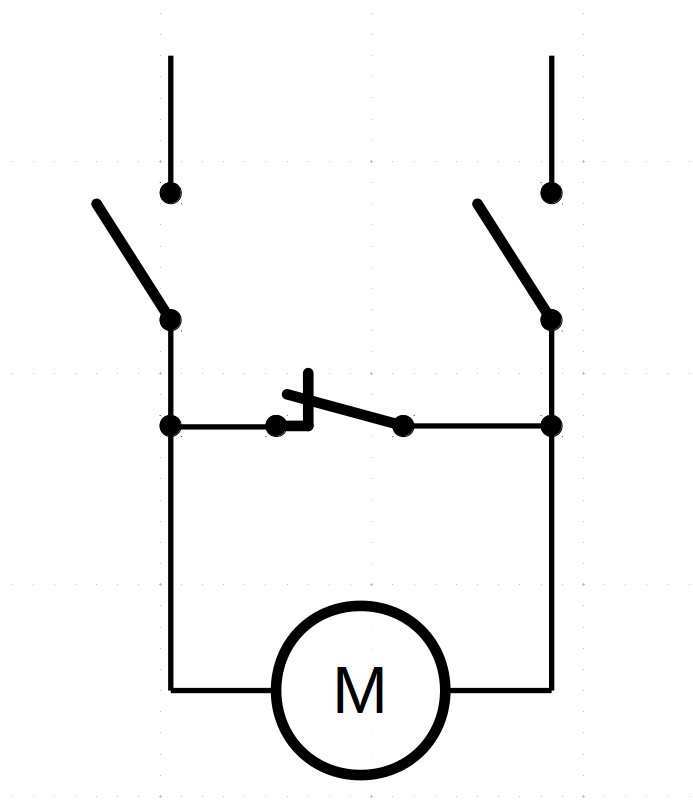
Abbildung 11: Läuft der Motor zu lange nach, hilft diese Schaltung, ihn schneller zu bremsen.
Node-RED dient eigentlich zum Verarbeiten von Nachrichten, die Geräte senden. Mit ein wenig Kreativität klicken Sie aber schnell einen Flow zusammen, der ein einfaches Modell steuert. Die Laufzeiteigenschaften von Node-RED eignen sich allerdings nicht für eine ernsthafte Anlagensteuerung. Für eine reale Steuerungsaufgabe könnte man eine der vielen möglichen Programmierumgebungen einsetzen, die das RevPi unterstützt. Die Förderbänder in Aktion zeigt ein Youtube-Video [11].
Fazit
Die Geräte der Revolution-Pi-Familie von Kunbus wirken durchweg gut durchdacht. Die robust aufgebaute Hardware entspricht dem Industriestandard, und es macht Spaß, damit zu arbeiten. Die frei zugänglichen Schaltpläne erlauben auch eine Reparatur der Geräte, was sich positiv auf die Umweltbilanz auswirkt.
Auf der Software-Seite geben sich die Geräte durch die offene API extrem flexibel. Der RevPi lässt sich quasi mit jeder beliebigen Sprache programmieren. Hinzu kommt, dass der RevPi einen Raspberry Pi als Kern verwendet, wodurch man auch Zugriff auf alle Software bekommt, die auf einem Pi läuft. Das bildet die Grundlage dafür, selbst anspruchsvollste Projekte in die Realität umzusetzen. (tle/jlu)
Glossar
- IEC
-
International Electrotechnical Commission. Eine internationale Organisation für Normen im Bereich der Elektrotechnik und Elektronik mit Sitz in Genf.
Infos
- RevPi-Module: https://revolution.kunbus.de/revolution-pi-serie/
- RevPi-Online-Shop: https://revolution.kunbus.de/shop/
- Datenblatt RevPi Core: https://revolution.kunbus.de/wp-content/uploads/manuell/datenblatt/Datenblatt_RevPi_Cores.pdf
- Datenblatt RevPi Connect: https://revolution.kunbus.de/wp-content/uploads/manuell/datenblatt/Datenblatt_RevPi_Connect-all.pdf
- Datenblatt RevPi Compact: https://revolution.kunbus.de/wp-content/uploads/manuell/datenblatt/Datenblatt_RevPi_Compact.pdf
- Raspbian herunterladen: https://revolution.kunbus.de/shop/de/stretch
- RevPi-Download-Bereich: https://revolution.kunbus.de/tutorials/downloads/
- 24-Volt-Steckernetzteil: https://www.reichelt.de/steckernetzteil-36-w-24-v-1-5-a-stabilisiert-gst36e24-p1j-p175853.html
- Anleitung zum Flashen: https://www.raspberrypi.org/documentation/hardware/computemodule/cm-emmc-flashing.md.
- RPi-Imager: https://www.raspberrypi.org/software/
- Node-RED: Martin Mohr, “Einer schafft an”, RPG 01-02/2019, S. 16, https://www.raspi-geek.de/41939
- Video der Förderbänder: https://youtu.be/u9vAv_rtMO8