Abbildung 1: Zum Zusammenbauen der Rapiro-Grundversion benötigen Sie keinen Lötkolben.
Die Anleitung des Herstellers [7] zeigt in über 200 Bildern in leicht nachvollziehbaren, einsteigertauglichen Schritten, wie man beim Zusammenbau vorgeht. Dennoch gehen mehrere Bastelstunden ins Land, bevor der Rapiro für seinen ersten Einsatz bereitsteht, da Sie alle Komponenten und Kabel innerhalb der kleinen Gehäuseteile exakt platzieren müssen.
In den Kopf des Rapiro setzen Sie bei Bedarf einen Raspberry Pi ein. Für erste Funktionstests genügt es aber, den Robot rein über das Arduino-Board zu steuern. Sobald Sie ihm jedoch komplexere Fähigkeiten verleihen möchten, führt kein Weg um den RasPi herum. In die Gehäuseaussparungen passt wahlweise das RasPi-Modell A oder B hinein.
Ein B+ lässt sich nur dann unterbringen, wenn Sie vorher dessen Klinkenausgang amputieren. Zudem liegen die USB-Anschlüsse anders als bei den Vorgängern, sodass sie sich teilweise nicht mehr von außen erreichen lassen. Das wirft Probleme auf, sobald man den Tüftler-Roboter später mit USB-Zusatzhardware kombinieren möchte. Daher sollten Sie gegebenenfalls einen RasPi Modell B für den Rapiro anschaffen.
Der Einbau diverser optionaler Zusatzhardware lohnt sich ebenfalls, um das Einsatzspektrum des Roboters zu erweitern. Die Pi-Kamera montieren Sie hinter einer winzigen Öffnung in der Rapiro-Stirn, zwei Lautsprecher finden hinter den “Ohren” des Robots Platz. Darüber hinaus gibt es zahlreiche weitere Möglichkeiten, so existiert beispielsweise auch eine Aussparung für einen Infrarot-Sensor. Bei diesem handelt es sich um die einzige Erweiterung, für die Sie zum Lötkolben greifen müssen. Als IR-Sensor kommt beispielsweise der Sharp GP2Y0A21YK infrage, den auch deutsche Elektronik-Versender anbieten.
Auf jeden Fall sollten Sie Ihrem Rapiro einen Nano-WLAN-Stick in den RasPi-Hinterkopf stecken. Dann lässt sich der Robot nicht nur über das Netz steuern, sondern kann auch selbst auf das Internet zugreifen – etwa für den Fall, dass Sie ihn per Skript die Termine aus dem Ihrem Online-Kalender vorlesen lassen.
Unter Strom
Zur Stromversorgung setzen Sie in das Batteriefach des Rapiro fünf AA-Akkus ein (Abbildung 2). Diese sollten Sie unmittelbar vorher vollständig aufladen. Da die 12 Servos des Roboters eine stabile Energiezufuhr benötigen, kann es sonst zu (auf den ersten Blick) unerklärlichen Verhaltensweisen Rapiros kommen. Die Fehlfunktion eines einzelnen Motors veranlasst oft ein komplettes Gelenk zu seltsamen Bewegungen.
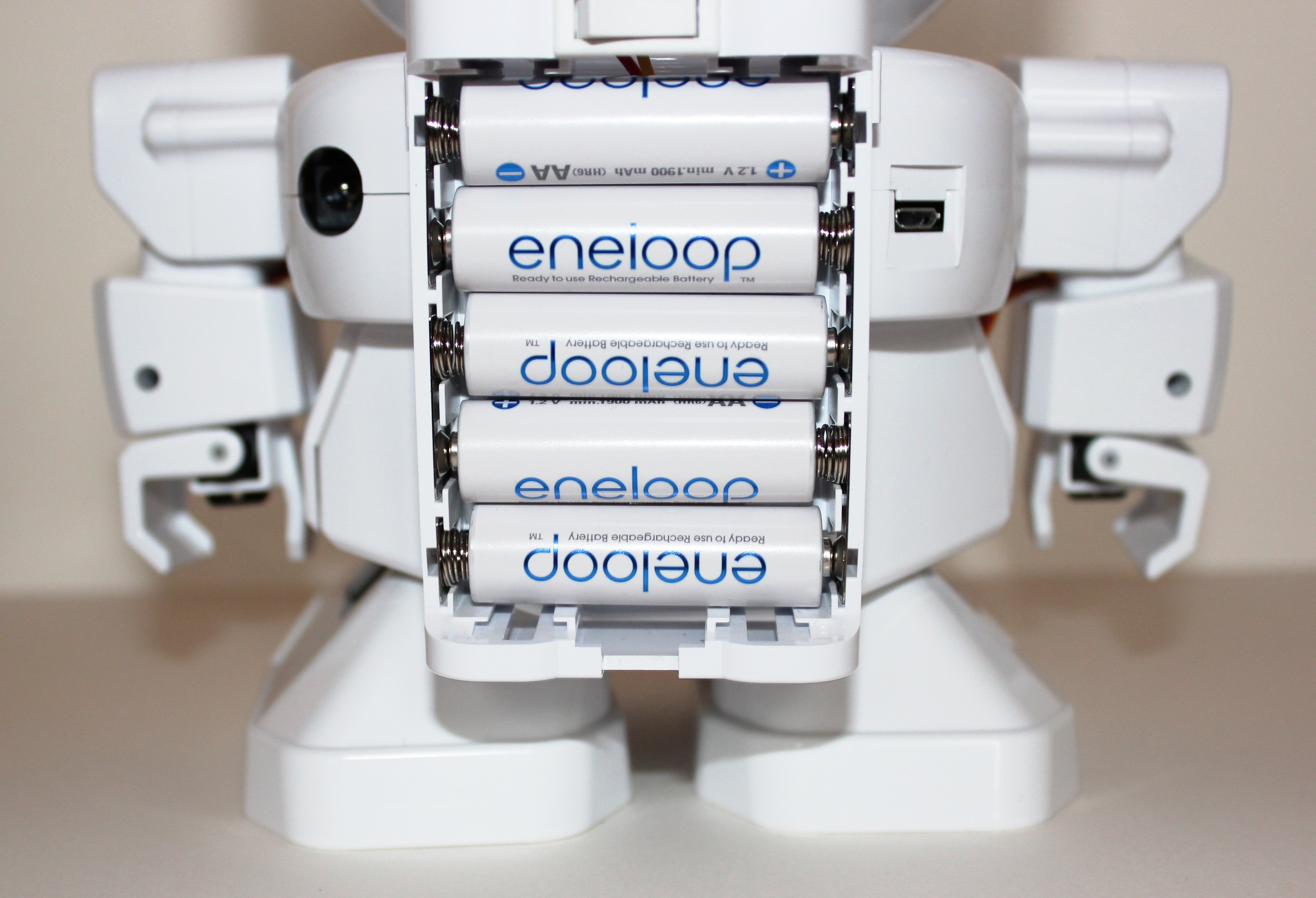
Abbildung 2: Energie bezieht Rapiro aus seinem Rücken.
Bei Akkus empfehlen wir, zu solchen der Marke “Panasonic eneloop” zu greifen. Bis vor zwei Jahren waren diese in Deutschland noch unter dem Namen “Sanyo eneloop” im Handel. Diese Akkus unterliegen im Vergleich zu denen anderer Hersteller einer wesentlich geringeren Selbstentladung.
Gelenkiges Kerlchen
Nach dem Einschalten führt der Rapiro sofort die Kommandos des Arduino-Boards aus. Dessen Sketch bildet also die Firmware des Robots. Nach dem Zusammenbau befinden sich normalerweise nicht alle Servos in der richtigen Ausgangsposition, weswegen der Rapiro nach dem Drücken des Einschaltknopfs eine schiefe oder verdrehte Körperhaltung einnimmt.
Das korrigieren Sie durch kleine Veränderungen am initialen Arduino-Sketch. Dazu verbinden Sie die Rückseite des Rapiro via USB mit einem Computer. Auf diesem installieren Sie einen FTDI-Treiber [8], sodass der Rechner das Board des Rapiro wie einen COM-Port ansprechen kann.
Außerdem benötigen Sie die Arduino-IDE [9]. Darin bearbeiten Sie die Standard-Firmware des Roboters, nachdem Sie deren Quellcode [10] heruntergeladen haben. Die mit dem Kommentar //Fine angle adjustments (degrees) überschriebene Sektion gibt für jeden der 12 Motoren innerhalb eines Arrays an, um wie viel Grad die Servos nach dem Einschalten gedreht werden sollen. Nach kurzem Experimentieren mit den Zahlen sollte Rapiro beim Starten immer kerzengerade in seiner Ausgangsposition dastehen (Abbildung 3).

Abbildung 3: Der Hände des Roboters sind für einfache Greifbewegungen ausgelegt.
Der kleine Roboter zeigt sich äußerst gelenkig und kann mit dem passenden Sketch sogar auf einem Bein balancieren, während er gleichzeitig Hüfte, Kopf und Arme in verschiedene Richtungen verdreht. Außerdem verfügt er über eine Reihe vorgefertigter Bewegungsabläufe. Um diese in der Arduino-IDE zu testen, öffnen Sie den Menüpunkt Serial Monitor und geben einen der Befehle aus der Tabelle “Vorgefertigte Bewegungsabläufe” ein.
Vorgefertigte Bewegungsabläufe
|
Befehl |
Aktion |
|---|---|
|
|
letzte Aktion stoppen, Ausgangsposition einnehmen |
|
|
vorwärts gehen |
|
|
rückwärts gehen |
|
|
nach rechts drehen |
|
|
nach links drehen |
|
|
beide Hände heben, mit rechter Hand winken |
|
|
nur mit der rechten Hand winken |
|
|
Arme heben und mit beiden Händen eine Greifbewegung ausführen |
|
|
mit linker Hand winken |
|
|
rechten Arm heben und gleichzeitig die Hüfte drehen |
Auf diese Weise überprüfen Sie die Motorik des Rapiro schneller, als wenn Sie erst einen Sketch dazu tippen müssten. Eine beliebige “Augenfarbe” (Abbildung 4) wählen Sie über den folgenden Befehl:
#PRRotwertGGrünwertBBlauwertTZeit
Die RGB-Werte definieren den Farbton, innerhalb der nach dem T angegebenen Zeit in Millisekunden überblenden die LEDs schrittweise auf die neue Farbe. Der Befehl #PR255G000B000T000 zeigt also beispielsweise sofort ein kräftiges Rot an. Einzelne Motoren lassen sich nach einem ähnlichen Schema bewegen. So bedeutet #PS01A180T010, dass der Servo mit der Nummer 01 (die Hüfte) innerhalb von 10 Millisekunden um 180 Grad drehen soll.

Abbildung 4: Sie können Rapiros Augen in jeder beliebigen RGB-Farbe aufleuchten lassen.
Eine Ebene höher
Besonders interessant wird der kleine Roboter erst im Zusammenspiel mit einem RasPi als Gehirn, sodass er auf die riesige Bandbreite an Software und Zusatzhardware für den Mini-Rechner zugreifen kann.
Über ein zum Arduino laufendes Kabel kann der RasPi die Kontrolle über alle Servos und LEDs übernehmen. Statt Sketches zu schreiben, programmieren Sie alles auf dem Raspberry. Das funktioniert verblüffend einfach: Der Pi erteilt dem Arduino über eine serielle Schnittstelle Befehle, so ähnlich also, als würde man den Arduino kabelgebunden vom PC aus steuern.





