
Mit wenigen Handgriffen steuern Sie aktive Bauelemente der Lego Power Functions (PF) mit dem Raspberry Pi und basteln so ein via WLAN ferngesteuertes Fahrzeug, das Sie mit einem Xbox360-Gamepad bedienen.
README
In diesem Artikel erfahren Sie, wie Sie mit Lego, einem RasPi, einem Gamepad und Java ein über WLAN ferngesteuertes und leicht modifzierbares Fahrzeug konstruieren.
Um ein Lego-Fahrzeug fernzusteuern, bieten sich die entsprechenden Bauteile aus Lego Mindstorms [1] oder auch die Infrarotkomponenten (IR) aus der Power-Functions-Reihe (PF, [2]) an. Allerdings bleibt ein Lerneffekt dabei weitgehend auf der Strecke, und das Spielzeug wäre auch schnell langweilig. Für den wissbegierigen Bastler gibt es deswegen keine Alternative zum Eigenbau. Auch finanziell lohnt sich eine Eigenentwicklung gegenüber Lego Mindstorms allemal. Der RasPi als Hauptsteuerelement bietet Ihnen alle Freiheiten und Erweiterungsmöglichkeiten, die damit einhergehen, wohingegen die PF-IR-Komponenten Sie sehr stark einschränken.
Neben dem RasPi und den Bauelementen für ein Lego-Fahrzeug benötigen Sie die Motoren, die die Schnittstelle von Lego zur Steuerelektronik bilden. Motoren aus der Lego-PF-Reihe eignen sich sehr gut. Als native Elemente integrieren sie sich direkt und problemlos in ein vorhandenes Modell. Für den schnellen Einstieg bietet sich als Basis das Lego-Modell 42006 an, das Sie mit zwei PF-Motoren aufrüsten (Abbildung 1). Das Anbauen der Antriebe gestaltet sich bei diesem Modell sehr einfach, weitere Komponenten für Getriebe und Lenkung benötigen Sie nicht.

Abbildung 1: Als Basis dient das Lego-Modell 42006 mit zwei modifizierten Motoren aus der PF-XL-Reihe von Lego.
Wie Abbildung 1 zeigt, wurden bei den Motoren die originalen Lego-Anschlüsse ersetzt. Damit sich die Motoren an ein Steckbrett anschließen lassen, lötete der Autor die Enden von Jumperkabeln an. Die PF-Motoren besitzen vier Leitungen (Abbildung 2). Die rote und die blaue dienen zur Stromversorgung, die inneren mit den gelben Kabelenden zur Steuerung durch den PF-IR-Empfänger [3]. Für das Ansteuern mit dem RasPi benötigen Sie nur die äußeren Leitungen.
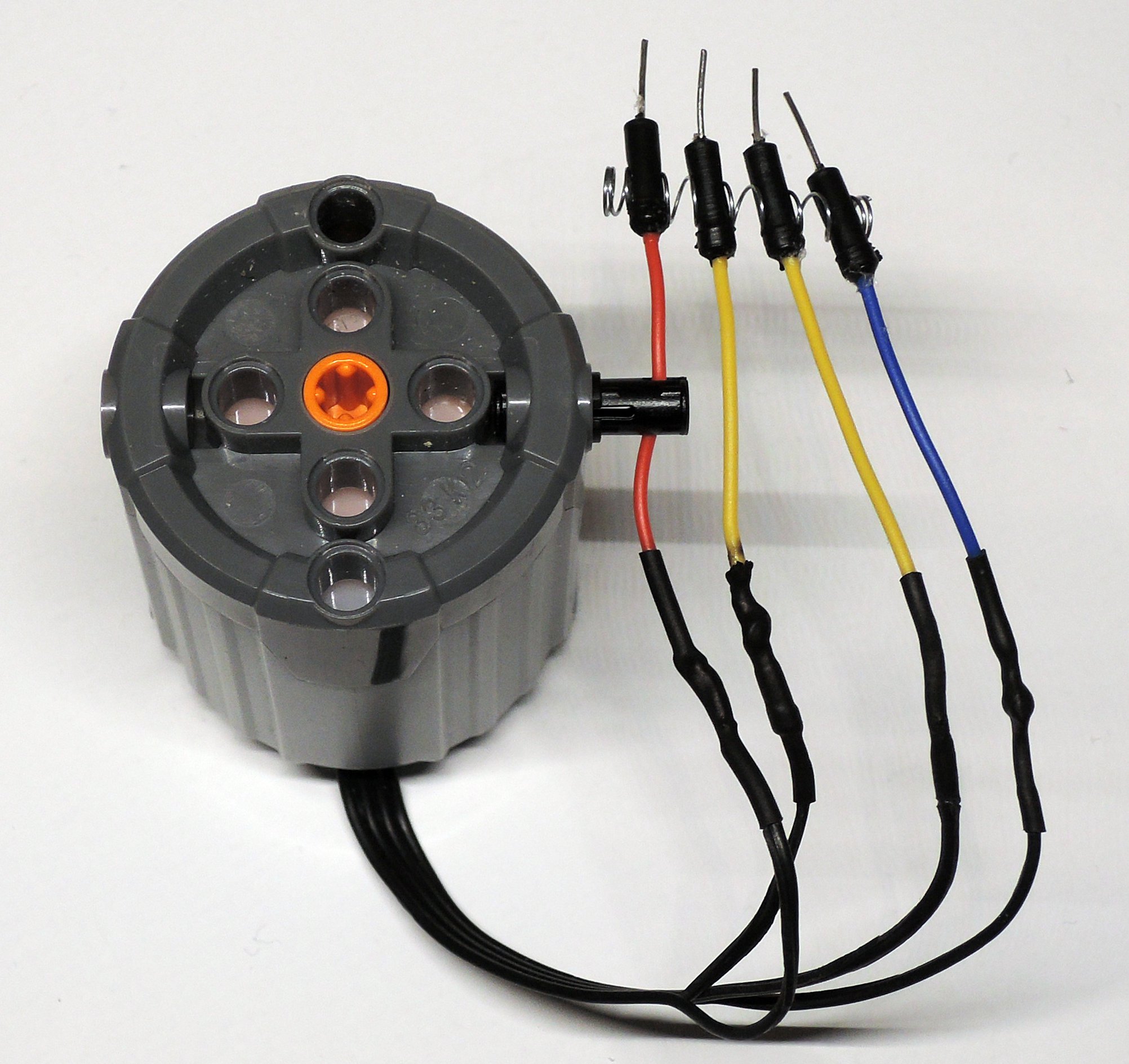
Abbildung 2: Um ihn an das Steckbrett anzuschließen, besitzt der PF-XL-Motor modifizierte Kabelenden.
Motortreiber
Die Enden der Jumperkabel besitzen eine männliche Bauform, da es in den meisten Fällen keine gute Idee ist, Motoren direkt an die GPIO-Pins des RasPi anzuschließen. Das liegt daran, dass diese nur eine sehr geringe Leistung liefern. Statt die Motoren direkt anzuschließen, nehmen Sie also besser einen Umweg über einen sogenannten Motortreiberchip. Diesen gibt es in verschiedenen Modellen, die sich aber in der Praxis wenig voneinander unterscheiden. Manche davon kommen auf einer eigenen Platine mitsamt Anschlüssen – in diesem Fall benötigen Sie kein zusätzliches Steckbrett. Den Motortreiberchip L293E bekommen Sie für wenige Euro beispielsweise bei Ebay. Abbildung 3 zeigt zwei teils schon verkabelte L293E-Chips auf einem Steckbrett.
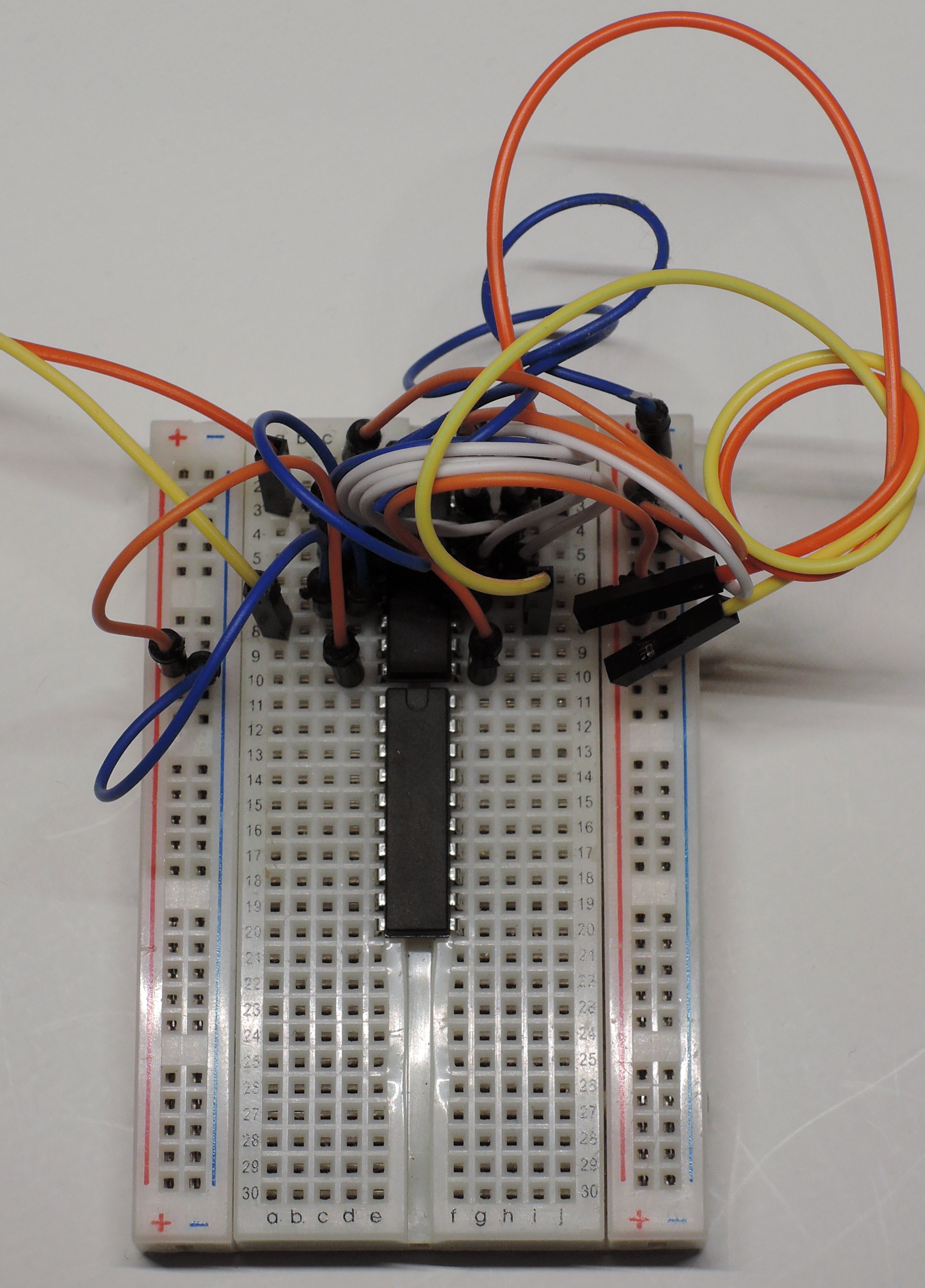
Abbildung 3: Auf dem Steckbrett angebrachte L293E-Chips sorgen in einer späteren Ausbaustufe für das korrekte Ansteuern der Motoren.
Ein L293E steuert bis zu zwei Motoren an. Die gilt es gemäß der Chip-Spezifikation anzuschließen (Abbildung 4). In diesem Fall bedeutet das: Sie stecken die äußeren Kabel des ersten Motors an Output 1 und Output 2 an, die des zweiten Motors an Output 3 und Output 4.

Abbildung 4: Die Pin-Belegung des Motortreiberchips L293E.
Zur Orientierung besitzt der L293E eine Aussparung an der Oberseite. Die Input-Pins des Chips schließen Sie an geeignete GPIO-Pins des RasPi an (Abbildung 5), etwa in der Kombination Input-Pins 1 und 2 an die GPIO-Pins 11 und 12 sowie Input-Pins 3 und 4 an die GPIO-Pins 15 und 16 [4].
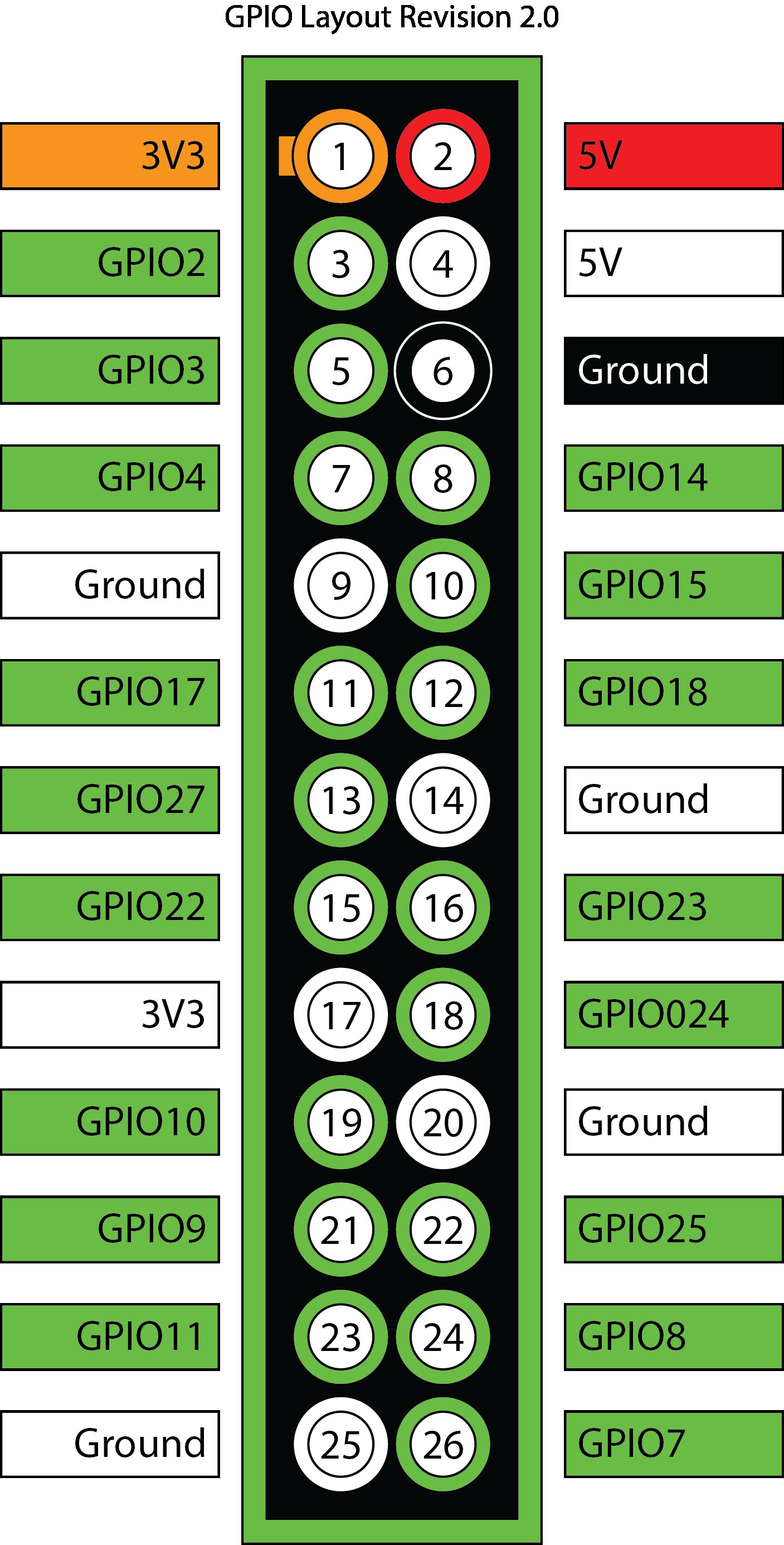
Abbildung 5: Das GPIO-Pin-Layout des Raspberry Pi.
Um zu verhindern, dass eine falsch angelegte Spannung den RasPi beschädigt, schalten Sie optional Dioden direkt hinter die GPIO-Pins. Diese bewirken, dass der Strom von diesen nur in Richtung Chip fließt und nicht entgegengesetzt. An den L293E schließen Sie außerdem den Strom für die Motoren an (Vs-Pin) und die Spannungsversorgung für den Chip selbst (Vss).
Die PF-Motoren besitzen eine Spannungsaufnahme von 9 Volt, lassen sich in der Regel aber auch problemlos mit 12 Volt betreiben (womit sie sogar mehr Leistung liefern). Eine Batterie-Box mit zehn 1,2-Volt-AA-Akkus (Abbildung 6) für die Motorversorgung liefert bei voller Ladung bis zu 12 Volt. Die Spannungsversorgung für den Motortreiberchip kommt vom 5-Volt-Pin des RasPi.
Neben dem Pin für die Versorgung des Chips müssen Sie auch noch die beiden Enable-Pins Chip**Enable**1 und Chip**Enable**2 mit 5 Volt beaufschlagen. Diese beiden Pins aktivieren und deaktivieren den dazugehörigen Output und dienen optional über ein PWM-Signal zur Geschwindigkeitsregelung. Zu guter Letzt verbinden Sie den GND– sowie die Sense-Pins mit dem 0-Volt-Pin des RasPi und dem entsprechenden Anschluss der Motorversorgung.
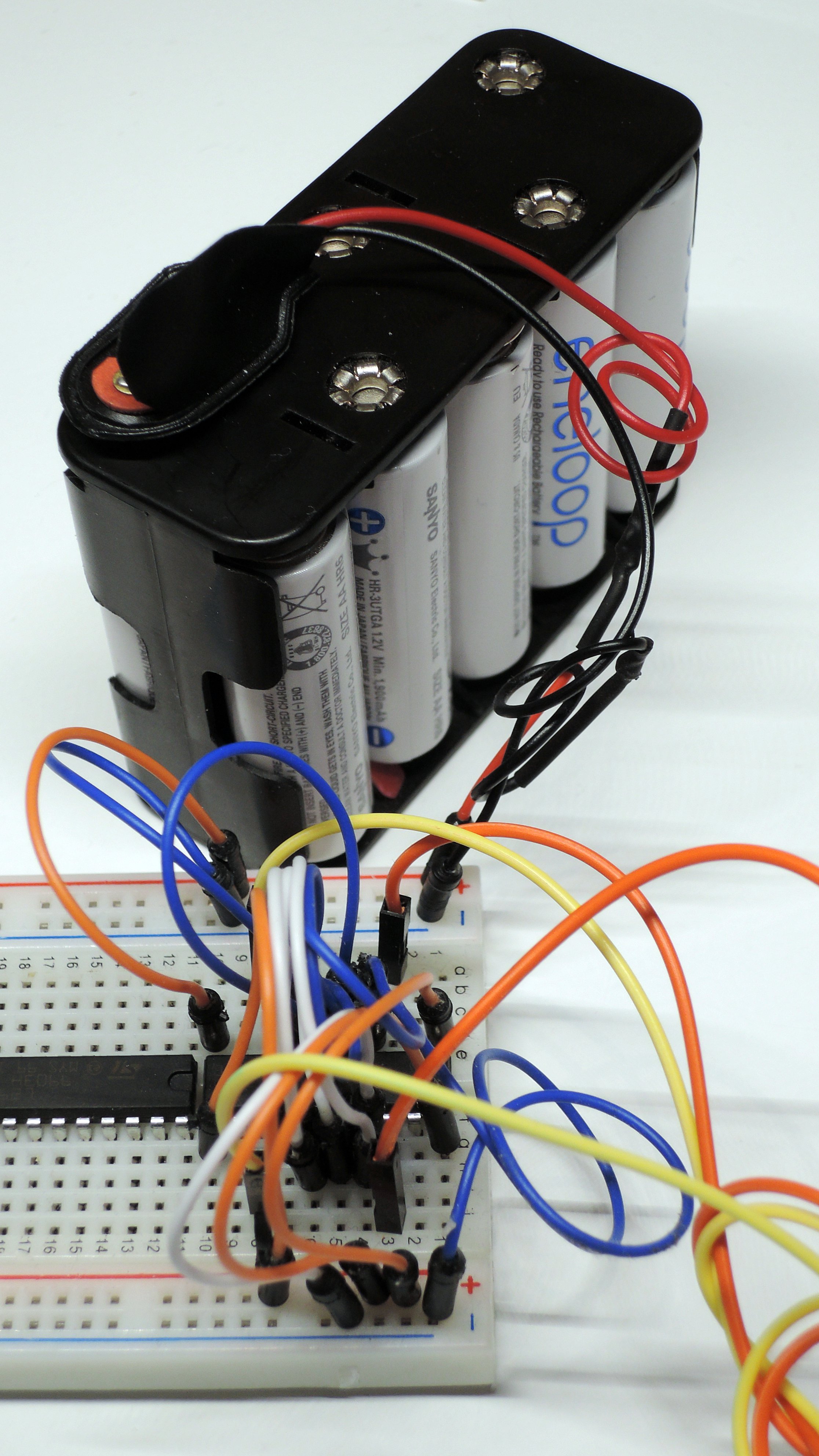
Abbildung 6: Eine Batterie-Box mit zehn 1,2-Volt-AA-Akkus sorgt für den Vortrieb der Konstruktion.
Nach dem Fertigstellen der Anschlüsse sollte die Belegung so aussehen wie in Abbildung 7 dargestellt. Nun gilt es, die Baugruppe an ein Chassis anzubringen, am besten unter Zuhilfenahme der oben genannten Lego-Kits. Zusätzlich fügen Sie noch die 5-Volt-Versorgung für den RasPi hinzu. Der EasyAcc PB12000A ist einer der 5-Volt-USB-Akkus, die sich in der Liste der bereits für den Mini-Rechner getesteten Geräte wiederfinden [5].
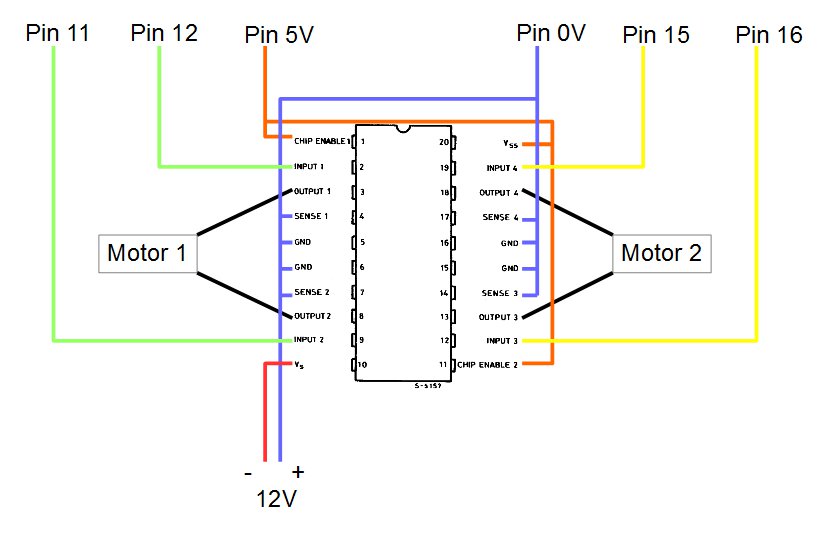
Abbildung 7: Nach diesem Schema schließen Sie den RasPi an den L293E-Steuerchip und die Stromversorgung an.
RasPi-Konfiguration
Auf der SD-Karte für den RasPi installieren Sie Raspbian. Ein Grundlagenartikel über die Inbetriebnahme des RasPis finden Sie in Ausgabe 02/2014 [6]. In diesem Projekt kam ein RasPi Modell B Rev.2 mit Raspbian Version 3.6.11+ zum Einsatz.
Um ins WLAN zu gelangen, benötigen Sie zusätzlich einen USB-WLAN-Adapter. Ein WL-167G V3 von Asus funktioniert mit dem RasPi problemlos [7], sodass Sie nur noch die Verbindung konfigurieren müssen. Hierzu öffnen Sie die Konfigurationsdatei /etc/network/interfaces und ergänzen diese um einen weiteren Eintrag. Falls die Datei noch nicht existiert, erstellen Sie diese zunächst. Eine Beispielkonfiguration, bei dem das System den WLAN-Adapter als Gerät wlan0 erkennt, zeigt Listing 1.





