Start
Bevor Sie mit dem ersten Modell starten, gibt es noch ein paar Vorarbeiten zu erledigen. Wie schon erwähnt sollten Sie vorab den Akku laden. Danach reißen Sie alle Tüten auf und kippen deren Inhalt in das große Fach in der Verpackung; so lassen sich die einzelnen Bauteile leichter finden.
Im Baukasten befindet sich eine auf Papier gedruckte Teststrecke für die Roboter. Diese braucht nach dem Auseinanderfalten etwas Zeit, bis sie komplett glatt ist. Legen Sie danach die Teststrecke aus. Damit Ihnen die Modelle bei den ersten Versuchen nicht davonfahren, sollten Sie noch eine Einzäunung um das Testgelände bauen (Abbildung 4). Jetzt führen Sie die auf Seite 4 der Bauanleitung beschriebenen Schritte durch.
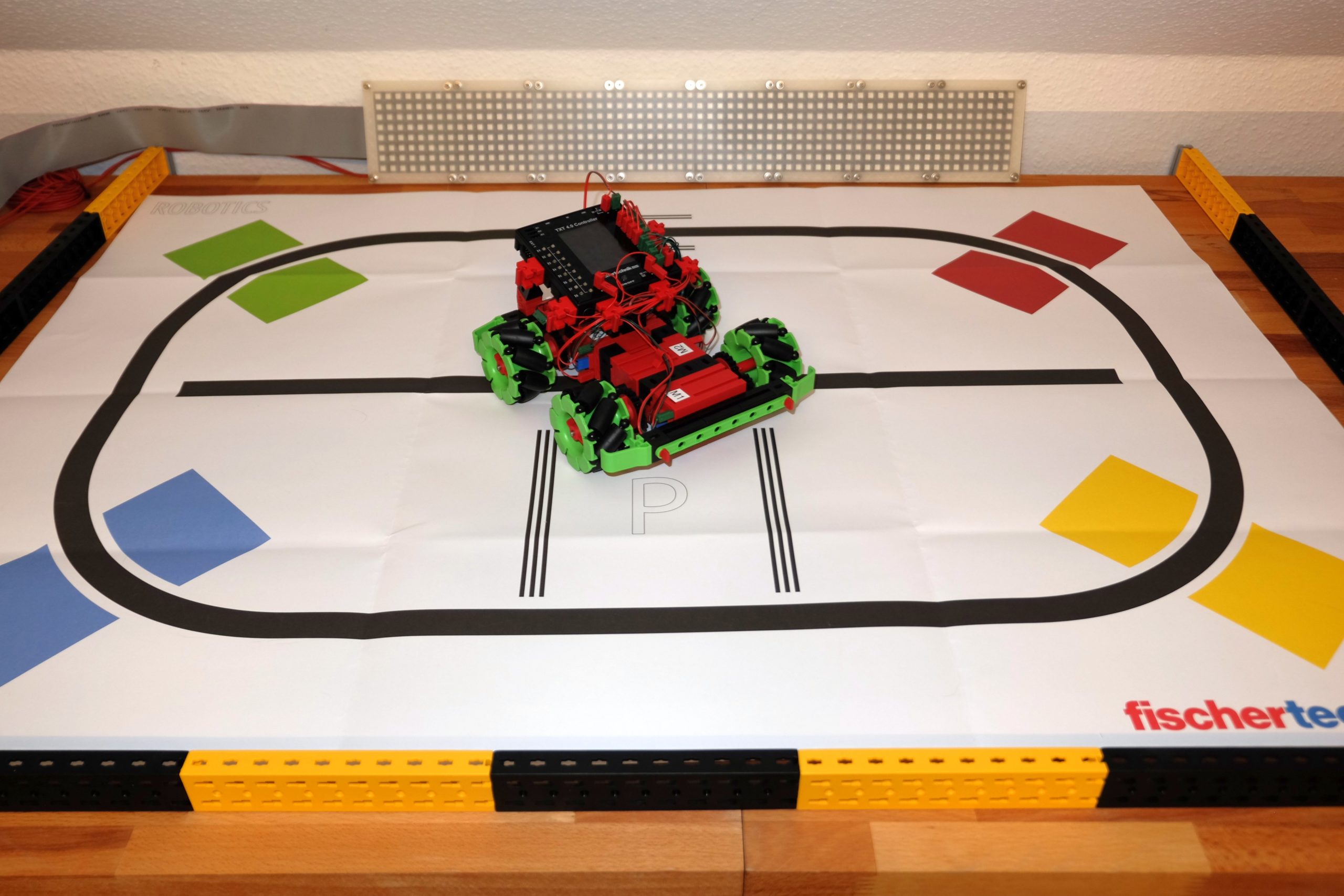
Abbildung 4: Das Testgelände mit Einzäunung. Letztere empfiehlt sich, damit das Modell im Parcours bleibt.
Funktionsmodell
Das Funktionsmodell dient dazu, die ersten Schritte mit dem TXT-4.0-Controller und ROBO Pro Coding zu gehen. Dabei lernen Sie die ersten Bauteile des Roboters und deren Funktionsweise kennen. Um das Modell aufzubauen, benötigen Sie zwischen 30 und 45 Minuten. Die Aufgaben dazu finden sich im Fischertechnik E-Learning-Bereich [6].
Grundsätzlich müssen Sie den Controller vor dem Programmieren konfigurieren. Das erledigen Sie im entsprechenden Tab der App. Dort wählen Sie den Controllertyp aus (derzeit gibt es nur den TXT 4.0). Danach verbinden Sie jeden einzelnen Anschluss des Controllers mit einem konkreten Gerät, etwa Motoren, LEDs oder beliebigen Sensoren. Um Fehler zu vermeiden, passen alle Geräte nur an die Anschlüsse, mit denen sie auch zusammenarbeiten. So lässt sich beispielsweise eine LED nicht mit einem Eingang verbinden.
Nach der Konfiguration des Controllers wechseln Sie in den Reiter Hauptprogramm. Hier bauen Sie jetzt Ihre Programme mit der grafischen Programmiersprache Blocky auf. In den Programmen stehen nur Controlleranschlüsse bereit, die Sie zuvor in der Konfiguration definieren. Durch dieses Vorgehen lassen sich Fehler in den Programmen vermeiden.
Blocky erlaubt das Zusammensetzen von Programmblöcken nur, wenn sie auch zusammenpassen. Das reduziert die möglichen Fehlerquellen in Programmen noch einmal um einiges. Die nervigen Syntaxfehler, die man von anderen Programmiersprachen kennt, gehören damit auch der Vergangenheit an.
Um den Controller ein Programm ausführen zu lassen, müssen Sie zunächst eine Verbindung zu ihm aufbauen. Dazu benötigen Sie seine IP-Adresse und den API-Schlüssel (Abbildung 5). Letzteren bringen Sie im Controller-Display über Einstellungen | API Schlüssel in Erfahrung. Das Verbinden erledigen Sie über das entsprechende Icon oben rechts in der App.
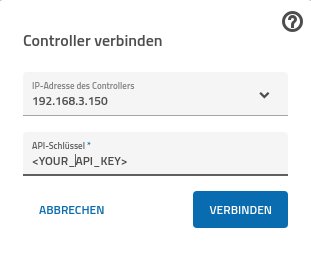
Abbildung 5: Verbindungsaufbau zum TXT-4.0-Controller.
Es gibt unterschiedliche Möglichkeiten, die Aufgaben [2] zu den einzelnen Modellen durchzuarbeiten. Oft genügt es, die Kurzbeschreibung zu lesen und auf eigene Faust loszulegen. Alternativ arbeiten Sie sich Schritt für Schritt durch die Anleitung. Ein guter Weg besteht darin, zuerst zu versuchen, die Aufgaben allein zu lösen; klappt das nicht, sehen Sie in die Lösungen.
Wenn Sie erste Versuche mit den Sensoren unternehmen, wissen Sie häufig nicht, welche Werte diese liefern. Das macht es auch ein wenig schwierig, die Programme passend zu schreiben. Um eine Vorstellung davon zu bekommen, mit welchen Eingangswerten Sie zu rechnen haben, hilft ein Schnittstellentest (Abbildung 6), den Sie rechts oben bei den Icons finden. Damit testen Sie die einzelnen Ein- und Ausgänge des Controllers und lesen die Werte von Sensoren aus. Darüber hinaus erweist sich der Test auch bei der Suche nach Fehlern in der Verdrahtung des Modells als nützlich.
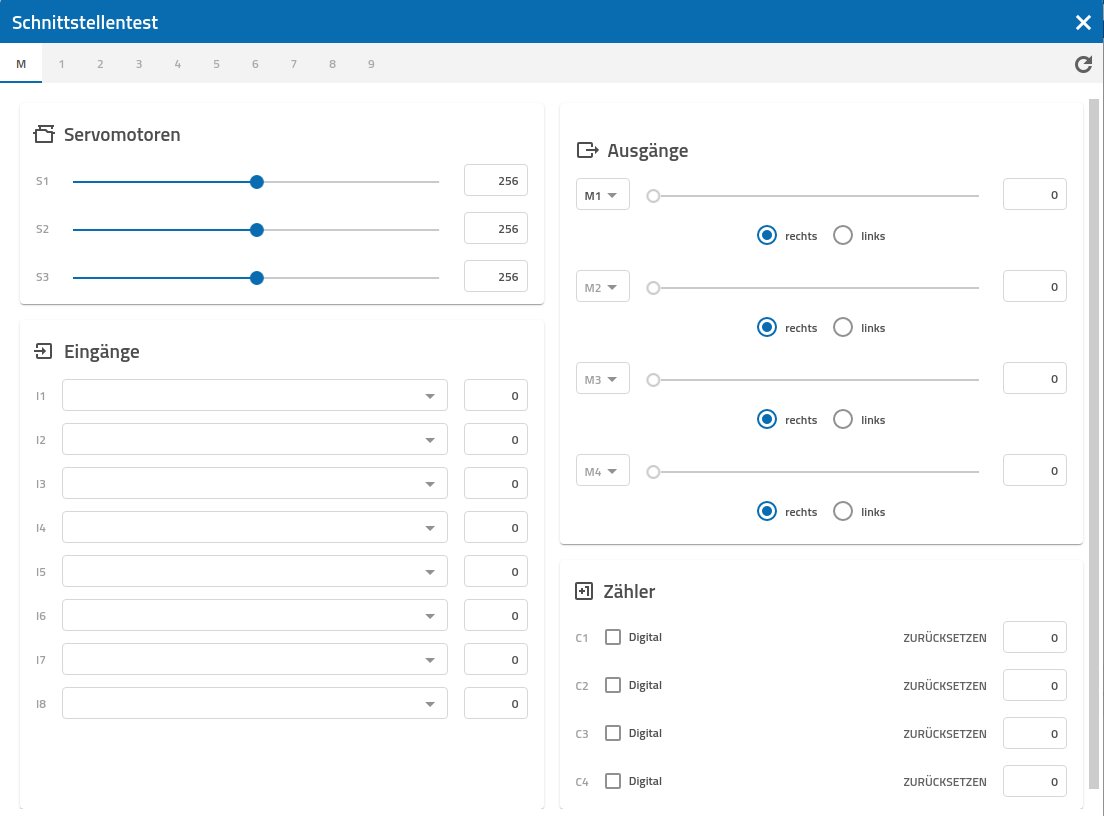
Abbildung 6: Mit dem Schnittstellentest testen Sie die Verdrahtung des Modells und lesen die Werte der Sensoren aus.
Ein Youtube-Video [7] zeigt ein einfaches Testprogramm, das den Distanzsensor und die Lichtschranke des Funktionsmodells abfragt. Je nachdem, welcher Sensor auslöst, dreht sich der Motor links oder rechts herum.
Fazit
Der Fischertechnik-Baukasten Robotics Hightech bietet alles, was das Herz eines Roboterbastlers höher schlagen lässt. Neben den neun vorhandenen Modellen lassen sich aus den vorhandenen Teilen und ein wenig Material aus dem eigenen Fundus komplett neue eigene Modelle aufbauen. Der Fantasie sind da keine Grenzen gesetzt. Die sehr detaillierten Anleitungen lassen keine Frage offen. In der kommenden Ausgabe stellen wir weitere Modelle des Baukastens vor. (tle)
Der Autor
Martin Mohr erlebte die komplette Entwicklung der modernen Computertechnik live mit. Nach dem Studium entwickelte er überwiegend Java-Applikationen. Mit dem RasPi erwachte seine alte Liebe zur Elektronik wieder.
Infos
- Fischertechnik-Baukasten Robotic Hightech: https://www.fischertechnik.de/de-de/produkte/spielen/robotics/559895-robotics-hightech
- E-Learning-Portal von Fischertechnik: https://www.fischertechnik.de/de-de/service/elearning/spielen/hightech/aufgaben
- Bewegungsrichtungen von Omniwheels (Video): https://youtu.be/Bc13lR5uhy8
- Anleitung TXT-4.0-Controller (PDF): https://www.fischertechnik.de/-/media/fischertechnik/fite/service/elearning/lehren/base-set-und-add-ons/fischertechnik-txt-bedienungsanleitung-005_de_261021.ashx
- Anleitung ROBO Pro Coding App: https://www.fischertechnik.de/elearning-hightech
- Aufgaben Funktionsmodell: https://www.fischertechnik.de/-/media/fischertechnik/fite/service/elearning/spielen/hightech/aufgaben/funktionsmodell.ashx
- Funktionsmodell (Video): https://youtu.be/AR-6U2uMzYA