Mit einer einfachen Schaltung testen Sie Bausteine, die über den SPI-Bus miteinander kommunizieren.
Der Serial-Peripheral-Interface-Bus (SPI) dient dazu, auf seriellem Weg Daten über kurze Entfernungen zu übertragen. Kurz bedeutet in diesem Kontext: nur wenige Zentimeter, also etwa auf einer Platine oder maximal innerhalb eines Geräts. Der SPI-Bus wurde ursprünglich von Motorola entwickelt und ist komplett frei von Patenten und Lizenzen.
Der Bus umfasst einen Bus-Master und beliebig viele Slaves, wobei der Master jederzeit die Kontrolle über die Kommunikation hat. Teilnehmer auf dem Bus erhalten über die Chip-Select-Leitung die Nachricht, dass Daten auf dem Bus für sie bestimmt sind. Hängen mehrere Bausteine am Bus, erfolgt das Adressieren über die Position im Bus. Der Master muss also die physikalische Topologie des Busses genau kennen, und diese darf sich nicht ändern.
Da beim SPI-Bus die Verwaltung kaum Overhead verursacht, lassen sich schnell und einfach große Datenmengen übertragen. Deshalb kommt SPI oft beim Ansteuern von Displays zum Einsatz.
Technisch gesehen fungiert der Bus als langes Schieberegister, in das Sie die Daten hineinschieben und wieder herauslesen. Die Datenübertragung erfolgt synchron, die Taktleitung (SCLK) versorgt alle Teilnehmer mit dem entsprechenden Signal. Die Daten laufen über die zwei Leitungen MOSI und MISO. Die Tabelle “Leitungen” fasst alle Leitungen des SPI-Busses zusammen.
|
Abkürzung |
Bedeutung |
|---|---|
|
SCLK |
Serial Clock |
|
MOSI |
Master Output, Slave Input |
|
MISO |
Master Input, Slave Output |
|
CS |
Chip Select (beliebig viele) |
Test-Hardware
Für den Testaufbau kommen einfache TTL-Schieberegister zum Einsatz. Die Ausgabe der Daten übernimmt das Seriell-zu-Parallel-Schieberegister SN74HC595 [1]. Um die Daten mit dem PC einzulesen, ist das Parallel-zu-Seriell-Schieberegister SN74HC165 [2] dazwischengeschaltet. Es braucht zum Anpassen des Signals noch etwas Hilfe vom Vierfach-NAND-Gatter SN7400 [3]. Sie verbinden die Halbleiter entsprechend den Schaltplänen in Abbildung 1 (Eingabe) und Abbildung 2 (Ausgang) mit dem CH341-Adapter [4].

Abbildung 1: Die zusätzlichen Gatter auf der Eingabeseite sind nötig, damit das Schieberegister mit dem Adapter CH341 zusammenarbeitet.
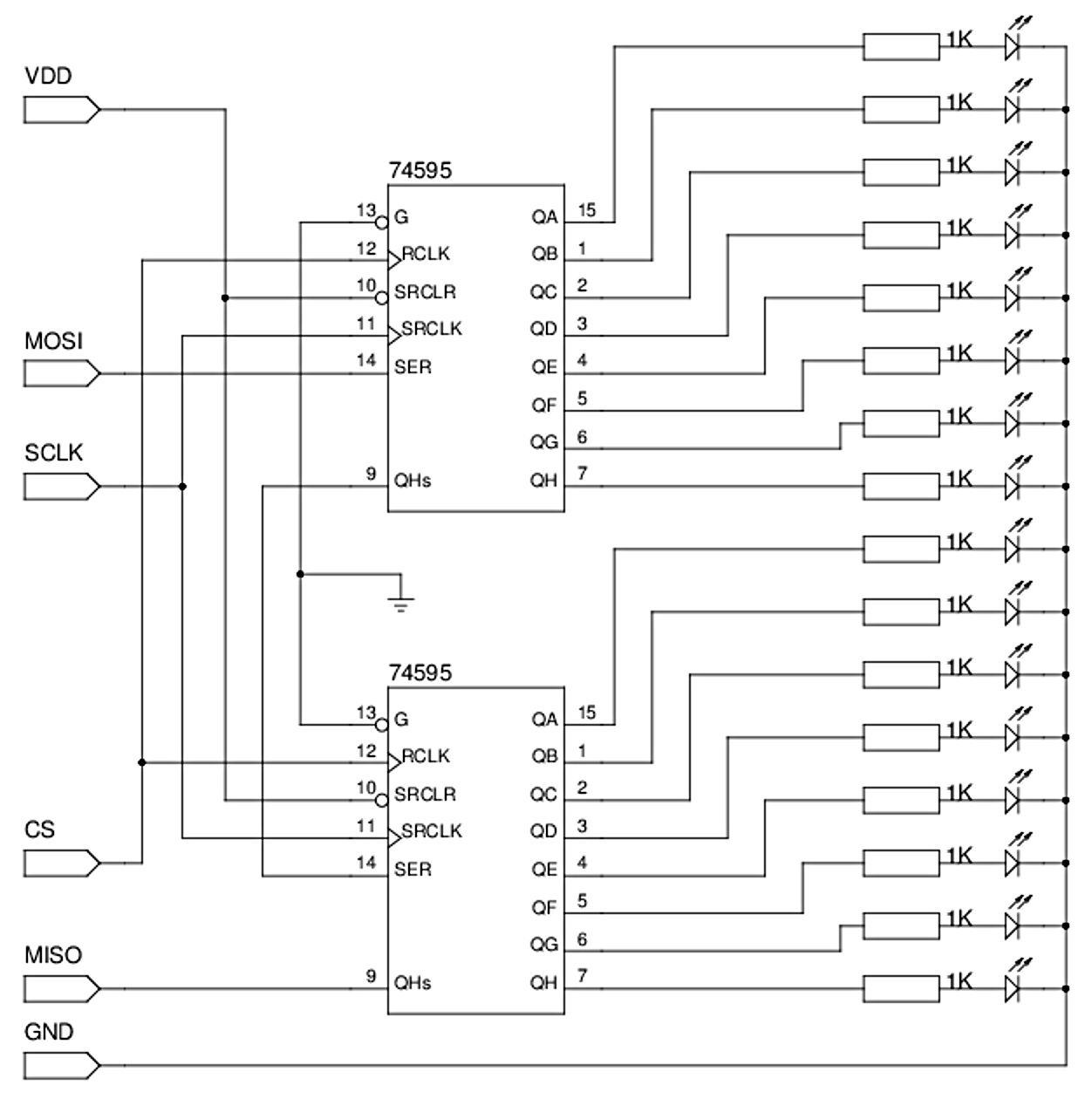
Abbildung 2: Am Ausgang der Schaltung zeigen die Leuchtdioden den Zustand der Register im jeweiligen Baustein an.
Auf dem Schaltplan für die Eingabe sehen Sie einige zusätzliche Gatter, die dafür sorgen, dass das SN74HC165 mit der SPI-Schnittstelle des CH341-Adapters zusammenarbeitet. Das einzelne Gatter in der Serial-Clock-Leitung invertiert das Signal, um die Daten während der fallenden Flanke des CLK-Signals weiterzuschieben. Ohne diese Modifikation kämen die Datenbits zeitlich leicht versetzt beim CH341 an, und das würde unweigerlich zu Fehlern beim Übertragen der Daten führen.
Die zweite Gatteranordnung aus drei NAND-Gattern erzeugt aus der fallenden Flanke des CS-Signals einen einzelnen Impuls. Er sorgt dafür, dass die Daten an den Eingängen des SN74HC165 im internen Schieberegister landen. Von dort aus gelangen sie dann seriell zum PC. Den kompletten Testaufbau zeigt Abbildung 3. Auf dem PC, der im Experiment zum Einsatz kam, lief Ubuntu 18.04 LTS [5].
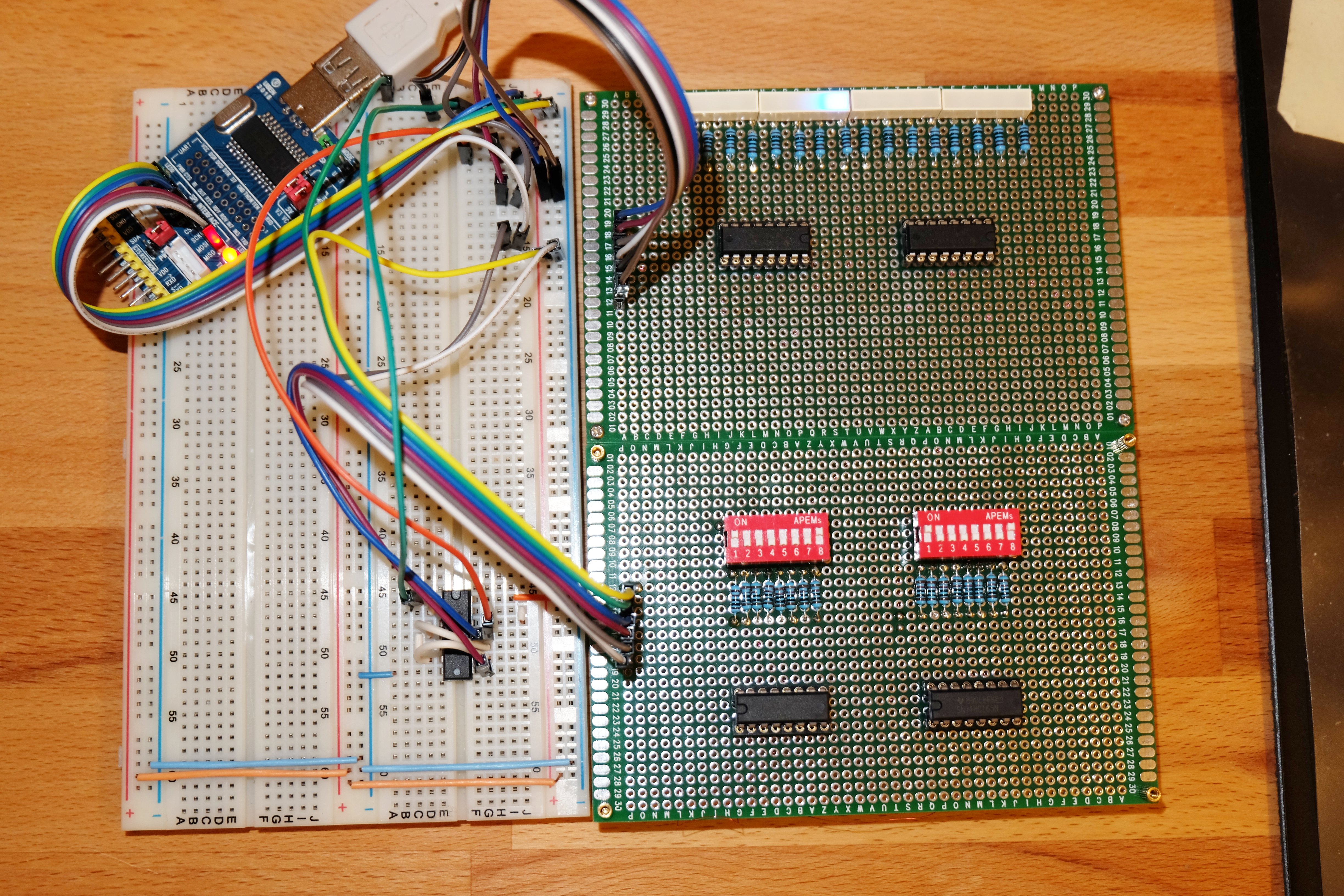
Abbildung 3: Der komplette Testaufbau mit dem SN7400 auf dem Breadboard.
CH341
Beim CH341 handelt es sich um einen USB-Konverter-Baustein, der die vom USB-Bus kommenden Daten an verschiedene andere Schnittstellen überträgt, darunter beispielsweise nach SPI, I2C, UART, RS232, RS485 und RS422 Parallel Printer. Durch die daraus resultierenden zahlreichen Möglichkeiten entsteht ein Nachteil: Die Pins des Bausteins haben je nach Einsatz unterschiedliche Funktionen. Kaufen Sie einen CH341-Adapter, ist immer nur ein Teil der Funktionen darauf aktiviert.
Das Modul, das im Beispiel zum Einsatz kommt, stellt als Schnittstellen SPI, I2C und UART bereit, wobei die Kommunikation wahlweise via SPI und I2C oder via UART erfolgt. Sie wählen den Modus über einen Jumper auf dem Adapter aus. Für die unterschiedlichen Schnittstellen brauchen Sie auf dem PC passende Treiber, sonst funktioniert die Kommunikation nicht fehlerfrei.
Unter Linux sind Treiber für Hardware meistens als ladbare Kernel-Module implementiert. Das Laden des Moduls für den Adapter erfordert etwas Vorarbeit. Zunächst schließen Sie den Adapter an einen freien USB-Port an und prüfen via Lsusb, ob und wo er am Bus auftaucht (Listing 1). Die Ausgabe variiert bei Ihrem System unter Umständen in Bezug auf Bus und Device. Ab dem Punkt ID sollten Sie aber dieselbe Ausgabe erhalten. Die ID benötigen Sie später, um die Berechtigungen auf das USB-Gerät anzupassen.
Listing 1
$ lsusb | grep CH341
Bus 008 Device 008: ID 1a86:5512 QinHeng Electronics CH341 in EPP/MEM/I2C mode, EPP/I2C adapter
Hat das System den Adapter erkannt, beginnt die eigentliche Installation des Treibers, den Sie direkt aus dem Quellcode bauen. Dazu müssen Sie unter Umständen einige Tools auf dem System einrichten. Das Paket build-essential beinhaltet alle zum Kompilieren von Software nötigen Tools und Programme. Das Paket dkms stellt die Unterstützung für nachladbare Kernel-Module bereit. Zu guter Letzt benötigen Sie noch Git, mit dem Sie auf das entsprechende Repository zugreifen. Das Kommando aus der ersten Zeile von Listing 2 installiert die drei Pakete.





