Die Kombination aus einem Fischertechnik-Bausatz und dem Controllino-Modul bietet eine ideale Basis, um ein funktionierendes Industriemodell zu gestalten.
Einen technischen Überblick zum Controllino-Modul finden Sie in einem Artikel in der Rubrik “Open Hardware” in dieser Ausgabe. Er beschreibt dessen technische Daten und das Einrichten der Arduino-IDE. In diesem Artikel erfahren Sie, wie einfach Sie mit dem Controllino-Modul auch komplexe Abläufe steuern.
Als Beispiel wählen wir das Ansteuern von drei Förderbändern und des Fischertechnik-Roboters aus dem Artikel “Dehnübungen”, den Sie ebenfalls in dieser Ausgabe finden. Der Roboter soll Metall- von Nichtmetallgegenständen trennen. Um die in diesem Artikel beschriebene Konstruktion nachzubauen, benötigen Sie die in der Tabelle “Ausgangsbasis” beschriebenen Materialien und Kenntnisse.
Ausgangsbasis
|
Hardware |
Controllino-Board, 6 Lichtschranken [1], 3 Motoren [2], 3 Achsenverbinder [3], Förderbänder (Fischertechnik-Modell 520398 [4], Förderband einzeln [5]), diverse Fischertechnik-Teile, induktiver Näherungsschalter [6], Netzteile für 5/12 Volt, diverse Elektrokleinteile und Leitungen |
|
Software |
gEDA (für die Schaltpläne), Arduino-IDE |
|
Kenntnisse |
Grundkenntnisse in C |
Das Szenario
Abbildung 1 zeigt den Aufbau der drei Förderbänder. Die dazu passenden Schaltpläne zeigen Abbildung 2 und Abbildung 3. Der Stromhunger der Lichtschranken erfordert ein eigenes 5-Volt-Netzteil. Die Positionen der Lichtschranken müssen Sie an den Versuchsaufbau anpassen; montieren Sie sie also so, dass sie sich leicht verschieben lassen.

Abbildung 1: Der Aufbau der drei Förderbänder samt Sortierarm, den ein separater Artikel in dieser Ausgabe detailliert beschreibt.
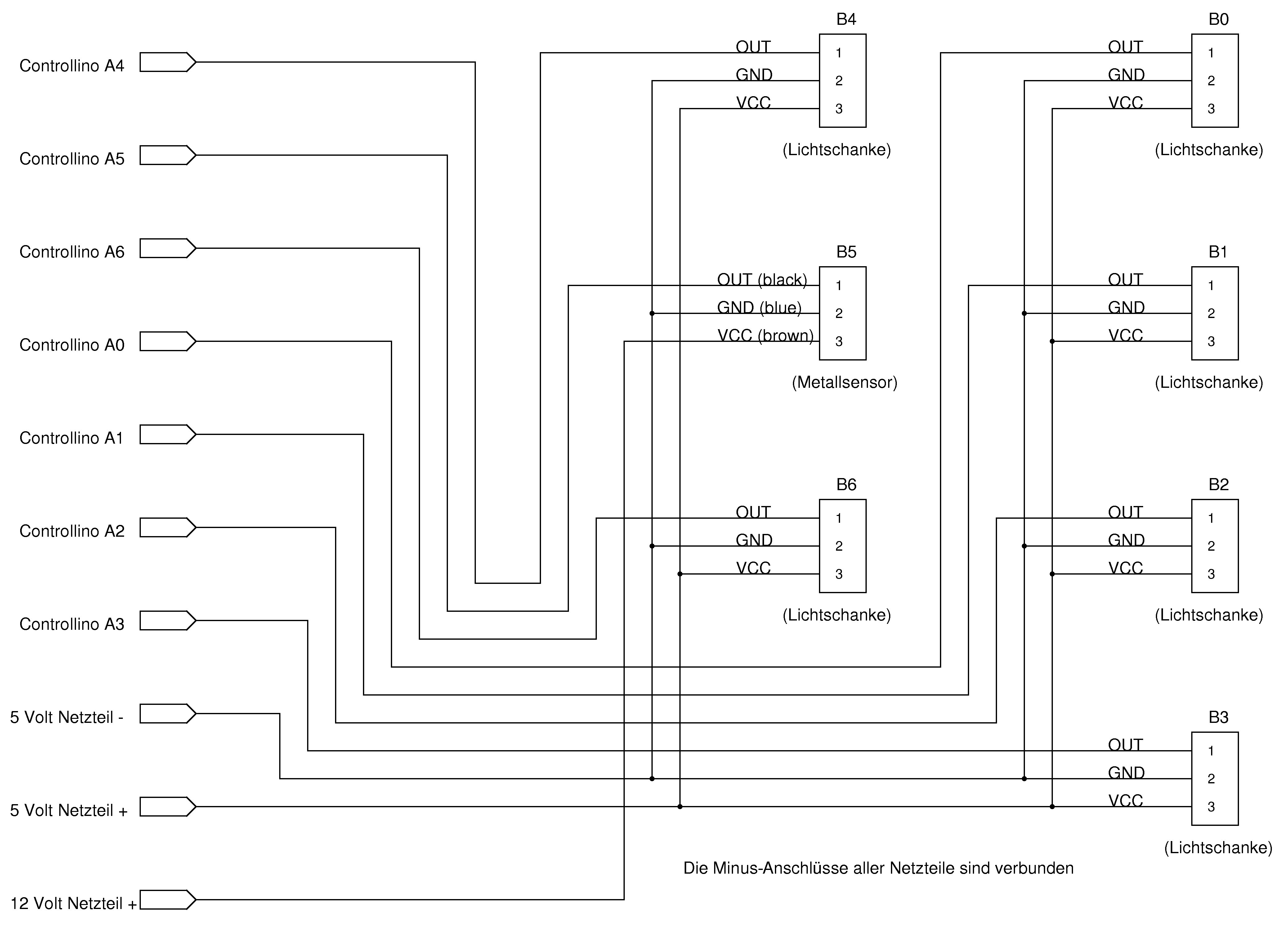
Abbildung 2: Der Schaltplan der Eingänge für die Lichtschranken.
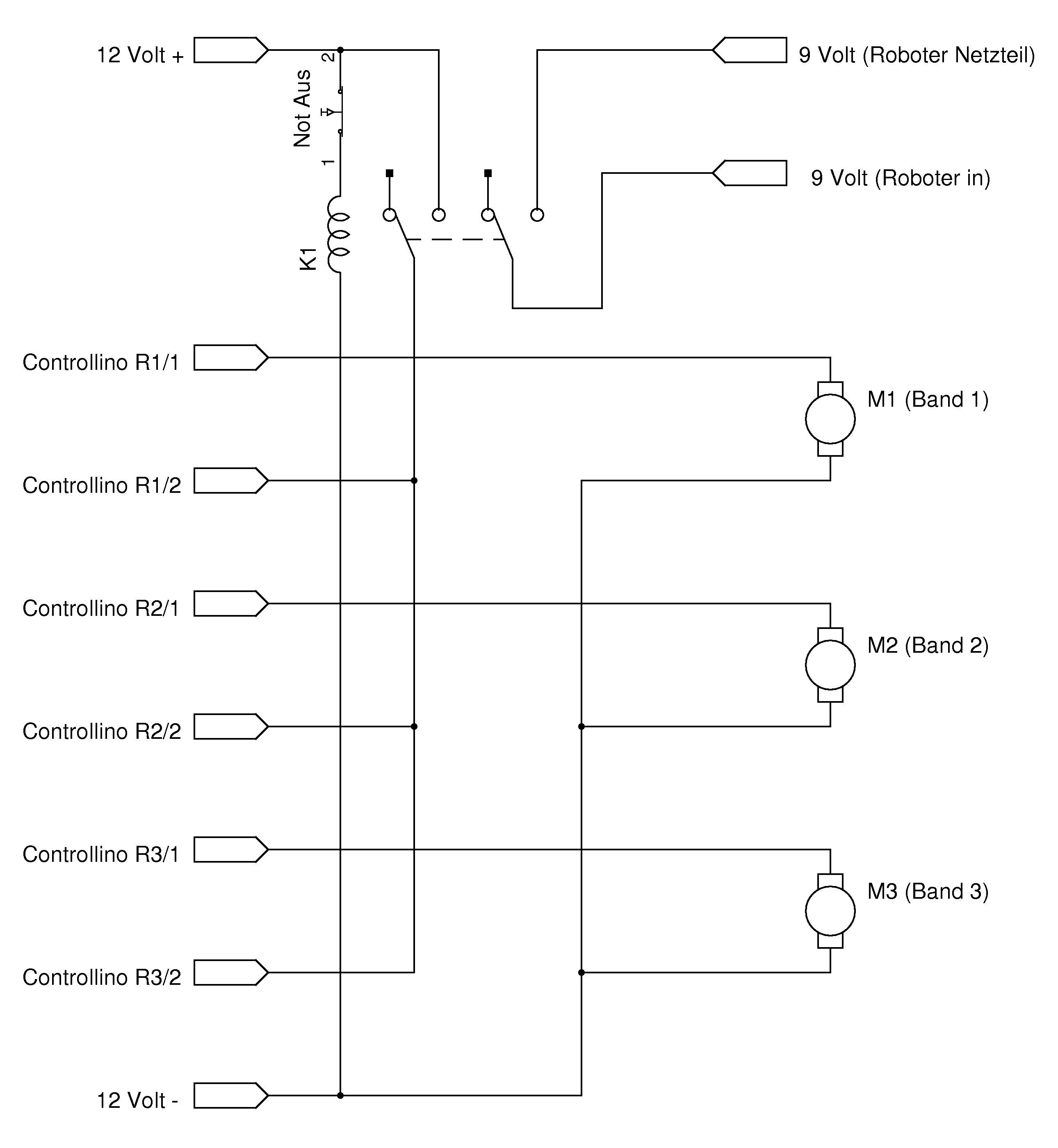
Abbildung 3: Der Schaltplan der Ausgänge zur Förderanlage und zu Notaus.
Der Metallsensor (siehe Kasten “Induktiver Näherungsschalter”) erfordert eine Spannung von 12 Volt. Er ist so angebracht, dass er die Oberseite der Gegenstände (in unserem Fall die gelben Tonnen aus dem Roboter-Baukasten) erfasst. Auf einer Seite der Tonne befindet sich ein Aluminiumband. Der induktive Näherungssensor arbeitet so genau, dass er selbst diese dünne Alu-Schicht als Metall erkennt.
Induktiver Näherungsschalter
Bei einem induktiven Näherungsschalter handelt es sich um einen Sensor, der auslöst, sobald sich Metall in seinem Erfassungsbereich befindet. Die Reichweite beträgt oft nur wenige Zentimeter. Sensoren dieses Typs bauen ein Magnetfeld auf und lösen aus, sobald ein Gegenstand das Feld stört. Nichtmetallische Gegenstände passieren den Sensor, ohne eine Reaktion auszulösen. Neben der induktiven Variante gibt es auch kapazitive Näherungsschalter, die statt des magnetischen ein elektrisches Feld zur Überwachung nutzen. Sie lösen aus, sobald sich ein beliebiger Gegenstand in ihrem Erfassungsbereich befindet – das Material spielt dabei keine Rolle.
Das Controllino-Modul [7] wie auch die Motoren benötigen ebenfalls eine Versorgungsspannung von 12 Volt. Die Minuspole aller Netzgeräte sind miteinander verbunden.
Unser Aufbau besteht aus drei Förderbändern, der Fischertechnik-Bausatz des Schaufelradbaggers (Modell 520398) enthält allerdings nur zwei. Möchten Sie das vorgestellte Szenario nachbauen, müssen Sie ein einzelnes Förderband nachbestellen [5].
Notausschalter
Bei allen automatisch laufenden Anlagen sollte auch der Bastler eine Notabschaltung einbauen. Sie sorgt dafür, dass sich mit einen Schalter alle Geräte und Aktoren stoppen lassen. Für eine spätere Fehleranalyse erhalten die Steuerungseinrichtungen aber weiterhin Spannung.
Der Notausschalter muss also die Spannung des Roboters und der Motoren für die Bänder ausschalten. Es gibt eigens für diese Aufgabe konzipierte Schalter. Der von uns verwendete nutzt ein zusätzliches Relais, da der Aufbau unterschiedliche Spannungen verwendet und ein herkömmlicher Notausschalter nur einen Stromkreis trennt.
Projektopfer
Bei jedem Projekt geht etwas schief. Der Autor möchte Ihnen die große Panne dieses Projekts nicht vorenthalten: Bei einem der ersten Tests betrieb er die Lichtschranken kurzzeitig mit 24 Volt, obwohl sie nur 5 Volt vertragen. Deren Hersteller sieht wohl eine optische Signaleinrichtung für Überspannungen vor, die aber nicht in den Datenblättern auftaucht. Als die Überspannung anlag, begannen alle Lichtschranken gleichzeitig zu qualmen und zu knistern – ein unmissverständlicher Hinweis darauf, dass etwas nicht stimmte. Nach einer Fehleranalyse und Reparatur stellte sich heraus, dass bei dem Unfall tatsächlich nur eine Lichtschranke das Zeitliche gesegnet hatte. Die fünf Rauchwolken bleiben dem Autor trotzdem für immer im Gedächtnis.
Im Betrieb
Um herauszufinden, in welche Richtung sich die Motoren der Förderbänder drehen, klemmen Sie diese kurz ab und schließen sie ohne das Controllino-Modul an die Betriebsspannung an. Drehen die Motoren richtig herum, schließen Sie sie wieder an, falls nicht, müssen Sie die Polarität ändern. Was bedeutet nun aber richtig herum? Eins der Bänder führt die Gegenstände zum Roboterarm hin, die beiden anderen transportieren Metall und Nichtmetall getrennt ab. Wie das am lebenden Objekt aussieht, zeigt ein kurzes Youtube-Video [8].